KAIST VIO dataset
This is the dataset for testing the robustness of various VO/VIO methods
You can download the whole dataset on KAIST VIO dataset
Related paper: Run Your Visual-Inertial Odometry on NVIDIA Jetson: Benchmark Tests on a Micro Aerial Vehicle (RA-L 2021)

Index
1. Trajectories
2. Downloads
3. Dataset format
4. Setup
1. Trajectories

- Four different trajectories: circle, infinity, square, and pure_rotation.
- Each trajectory has three types of sequence: normal speed, fast speed, and rotation.
- The pure rotation sequence has only normal speed, fast speed types
2. Downloads
You can download a single ROS bag file from the link below. (or whole dataset from KAIST VIO dataset)
| Trajectory | Type | ROS bag download |
|---|---|---|
| circle | normal fast rotation |
link link link |
| infinity | normal fast rotation |
link link link |
| square | normal fast rotation |
link link link |
| rotation | normal fast |
link link |
3. Dataset format
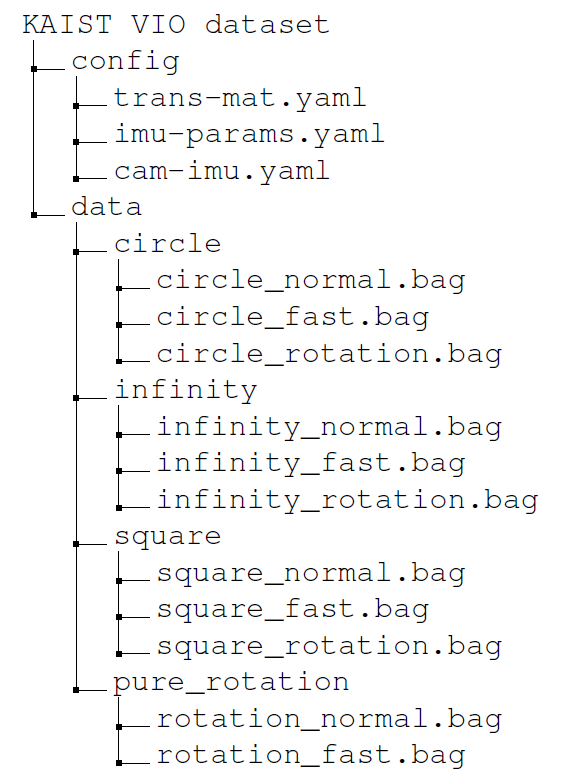
- Each set of data is recorded as a ROS bag file.
- Each data sequence contains the followings:
- stereo infra images (w/ emitter turned off)
- mono RGB image
- IMU data (3-axes accelerometer, 3-axes gyroscopes)
- 6-DOF Ground-Truth
- ROS topic
- Camera(30 Hz): "/camera/infra1(2)/image_rect_raw/compressed", "/camera/color/image_raw/compressed"
- IMU(100 Hz): "/mavros/imu/data"
- Ground-Truth(50 Hz): "/pose_transformed"
- In the config directory
- trans-mat.yaml: translational matrix between the origin of the Ground-Truth and the VI sensor unit.
(the offset has already been applied to the bag data, and this YAML file has estimated offset values, just for reference. To benchmark your VO/VIO method more accurately, you can use your alignment method with other tools, like origin alignment or Umeyama alignment from evo) - imu-params.yaml: estimated noise parameters of Pixhawk 4 mini
- cam-imu.yaml: Camera intrinsics, Camera-IMU extrinsics in kalibr format
- trans-mat.yaml: translational matrix between the origin of the Ground-Truth and the VI sensor unit.
4. Setup
- Hardware

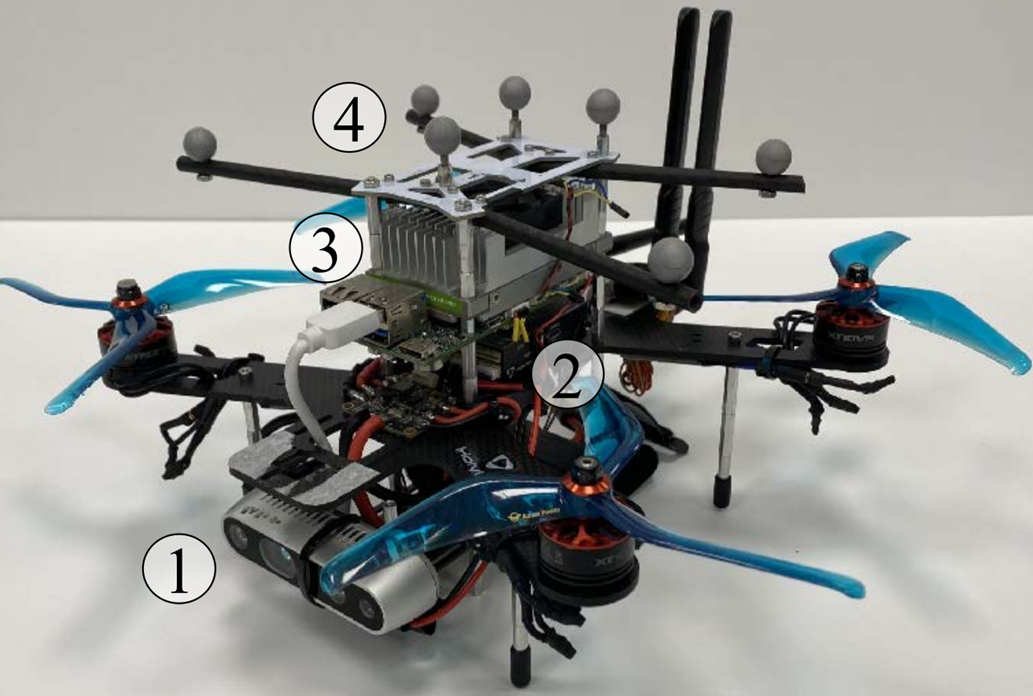
Fig.1 Lab Environment Fig.2 UAV platform
- VI sensor unit
- camera: Intel Realsense D435i (640x480 for infra 1,2 & RGB images)
- IMU: Pixhawk 4 mini
- VI sensor unit was calibrated by using kalibr
- Ground-Truth
- OptiTrack PrimeX 13 motion capture system with six cameras was used
- including 6-DOF motion information.
- Software (VO/VIO Algorithms): How to set each (publicly available) algorithm on the jetson board
| VO/VIO | Setup link |
|---|---|
| VINS-Mono | link |
| ROVIO | link |
| VINS-Fusion | link |
| Stereo-MSCKF | link |
| Kimera | link |
5. Citing
If you use the dataset in an academic context, please cite the following publication:
@article{jeon2021run,
title={Run Your Visual-Inertial Odometry on NVIDIA Jetson: Benchmark Tests on a Micro Aerial Vehicle},
author={Jeon, Jinwoo and Jung, Sungwook and Lee, Eungchang and Choi, Duckyu and Myung, Hyun},
journal={arXiv preprint arXiv:2103.01655},
year={2021}
}
6. Lisence
This datasets are released under the Creative Commons license (CC BY-NC-SA 3.0), which is free for non-commercial use (including research).
GitHub



You might also like...
Training and testing codes for dataset CIFAR-10
Training and testing codes for dataset CIFAR-10

Merge of two major cyber adversary datasets, MITRE ATT&CK and ETDA/ThaiCERT Threat Actor Cards
Merge of two major cyber adversary datasets, MITRE ATT&CK and ETDA/ThaiCERT Threat Actor Cards
A Dog Is Passing Over The Jet? A Text-Generation Dataset for Korean Commonsense Reasoning and Evaluation
A Dog Is Passing Over The Jet? A Text-Generation Dataset for Korean Commonsense Reasoning and Evaluation
Simplified dataset (.txt) of 50000+ chess games played online by Magnus Carlsen
Simplified dataset (.txt) of 50000+ chess games played online by Magnus Carlsen
CPED: A Large-Scale Chinese Personalized and Emotional Dialogue Dataset for Conversational AI
CPED: A Large-Scale Chinese Personalized and Emotional Dialogue Dataset for Conversational AI
A library for easily evaluating machine learning models and datasets
A library for easily evaluating machine learning models and datasets

A streamlit web app visualizing global surface water datasets
A streamlit web app visualizing global surface water datasets.

HAnd Gesture Recognition Image Dataset
HAnd Gesture Recognition Image Dataset