10th place solution for Google Smartphone Decimeter Challenge at kaggle
Google Smartphone Decimeter Challenge
Global Navigation Satellite System (GNSS) provides raw signals, which the GPS chipset uses to compute a position.
Current mobile phones only offer 3-5 meters of positioning accuracy. While useful in many cases,
it can create a “jumpy” experience. For many use cases the results are not fine nor stable enough to be reliable.
This competition, hosted by the Android GPS team, is being presented at the ION GNSS+ 2021 Conference.
They seek to advance research in smartphone GNSS positioning accuracy
and help people better navigate the world around them.
In this competition, you'll use data collected from the host team’s own Android phones
to compute location down to decimeter or even centimeter resolution, if possible.
You'll have access to precise ground truth, raw GPS measurements,
and assistance data from nearby GPS stations, in order to train and test your submissions.
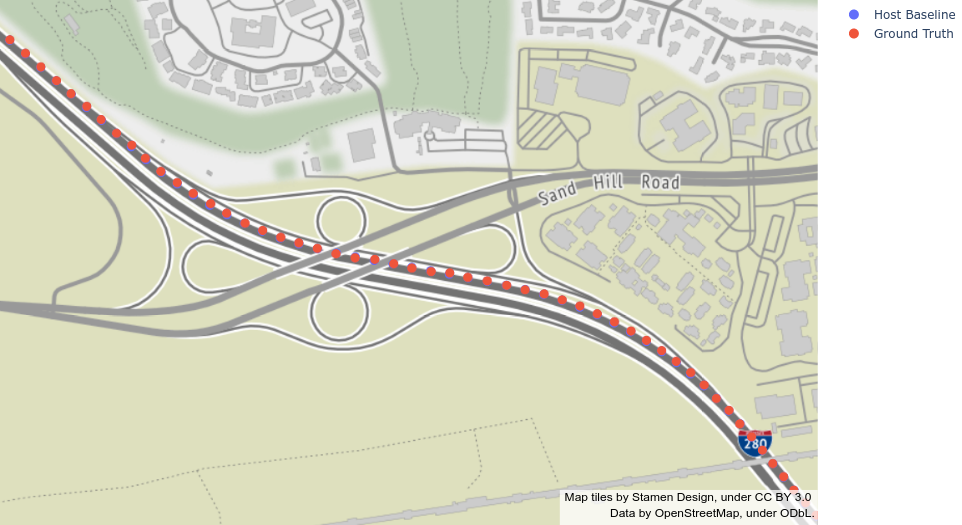
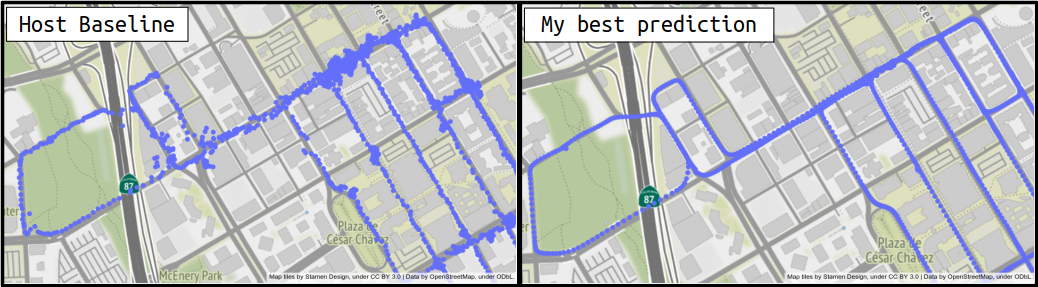
- Predictions with host baseline for highway area(upper figure) are really good, but for downtown area(lower figure) are noisy due to the effect of Multipath.

Overview
- Predicting the Noise,
Noise = Ground Truth - Baseline, like denoising in computer vision - Using the speed
latDeg(t + dt) - latDeg(t)/dtas input instead of the absolute position for preventing overfitting on the train dataset. - Making 2D image input with Short Time Fourier Transform, STFT, and then using ImageNet convolutional neural network
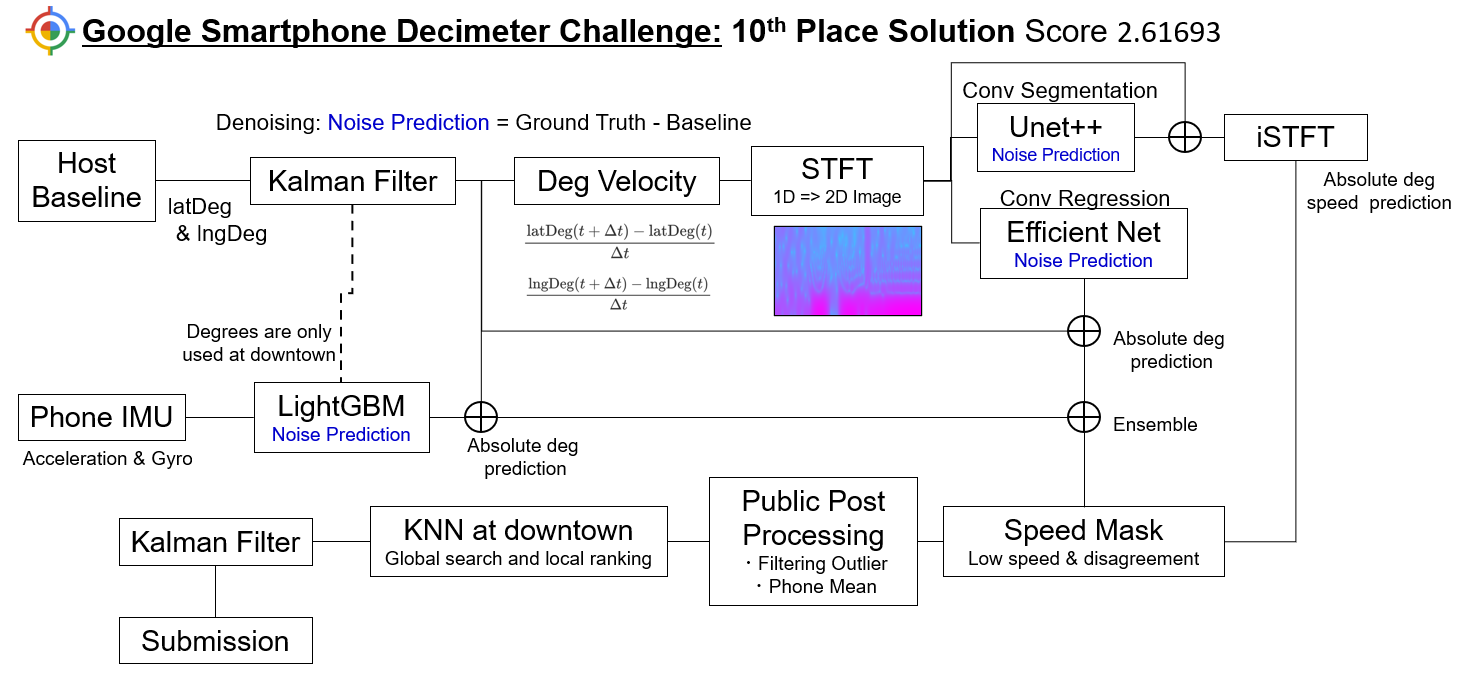
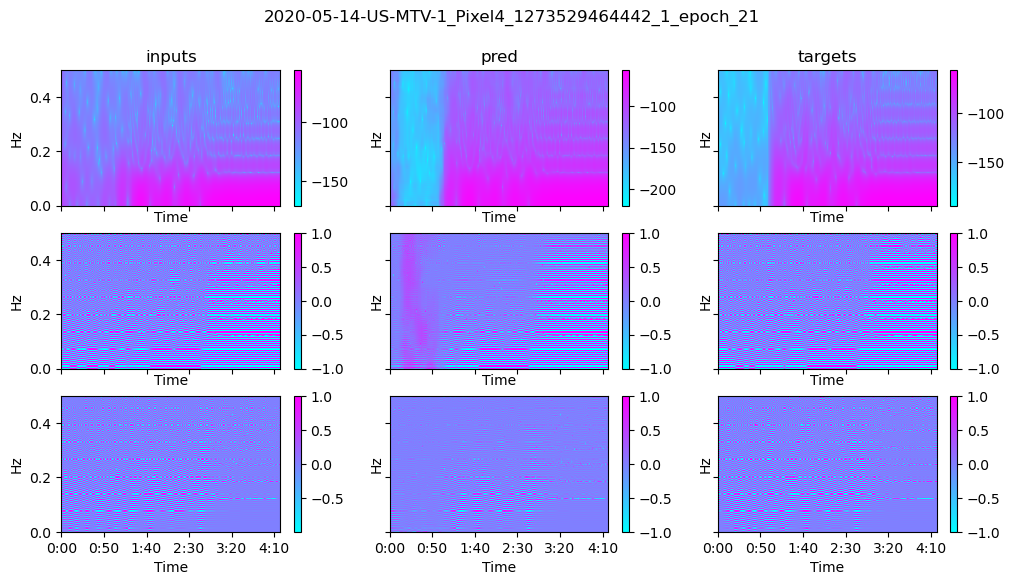
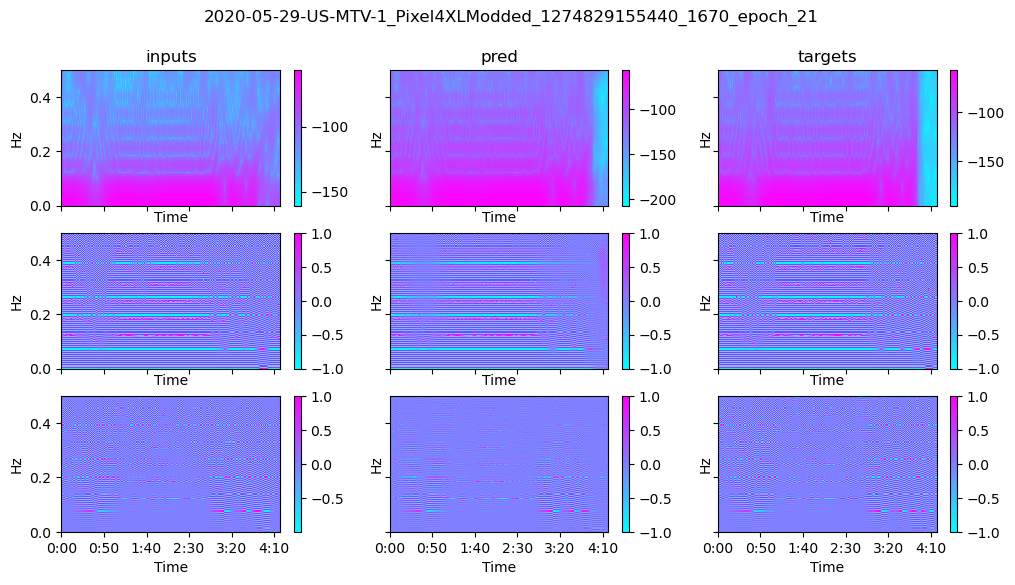
STFT and Conv Network Part
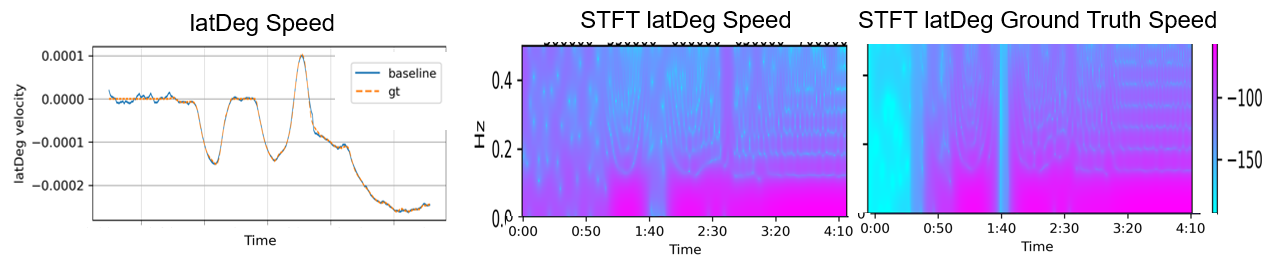
- Input: Using librosa, generating STFT for both latDeg&lngDeg speeds.
- Each phone sequence are split into 256 seconds sequence then STFT with
n_tft=256,hop_length=1andwin_length=16, result in (256, 127, 2) feature for each degree. The following 2D images are generated from 1D sequence.
- Each phone sequence are split into 256 seconds sequence then STFT with
- Model: Regression and Segmentation
- Regression: EfficientNet B3, predict latDeg&lngDeg noise,
- Segmentation: Unet ++ with EfficientNet encoder(segmentation pyroch) , predict stft noise
-
segmentation prediction + input STFT -> inverse STFT -> prediction of latDeg&lngDeg speeds
-
this speed prediction was used for:
- Low speed mask; The points of low speed area are replaced with its median.
- Speed disagreement mask: If the speed from position prediction and this speed prediction differ a lot, remove such points and interpolate.
-
prediction example for the segmentation.
-
LightGBM Part
- Input: IMU data excluding magnetic filed feature
- also excluding y acceleration and z gyro because of phone mounting condition
- adding moving average as additional features,
window_size=5, 15, 45
- Predict latDeg&lngDeg noise
KNN at downtown Part
similar to Snap to Grid, but using both global and local feature. Local re-ranking comes from the host baseline of GLR2021
- Use train ground truth as database
- Global search: query(latDeg&lngDeg) -> find 10 candidates
- Local re-ranking: query(latDeg&lngDeg speeds and its moving averages) -> find 3 candidates -> taking mean over candidates
Public Post Process Part
There are lots of nice and effective PPs in public notebooks. Thanks to the all authors. I used the following notebooks.
score
- Check each idea with late submissions.
- actually conv position pred part implemented near deadline, before that I used only the segmentation model for STFT image.
| status | Host baseline + Public PP | conv position pred | gbm | speed mask | knn global | knn local | Private Board Score |
|---|---|---|---|---|---|---|---|
| 1 day before deadline | ✓ | ✓ | ✓ | ✓ | 3.07323 | ||
| 10 hours before deadline | ✓ | ✓ | ✓ | ✓ | ✓ | 2.80185 | |
| my best submission | ✓ | ✓ | ✓ | ✓ | ✓ | ✓ | 2.61693 |
| late sub | 5.423 | ||||||
| late sub | ✓ | 3.61910 | |||||
| late sub | ✓ | ✓ | 3.28516 | ||||
| late sub | ✓ | ✓ | ✓ | 3.19016 | |||
| late sub | ✓ | ✓ | ✓ | ✓ | 2.81074 | ||
| late sub | ✓ | ✓ | ✓ | ✓ | ✓ | 2.66377 |
How to run
environment
- Ubuntu 18.04
- Python with Anaconda
- NVIDIA GPUx1
Data Preparation
First, download the data, here,
and then place it like below.
../input/
└ google-smartphone-decimeter-challenge/
During run, temporary cached will be stored under ../data/ and outputs will be stored under ../working/ through
hydra.
Code&Pacakage Installation
# clone project
git clone https://github.com/Fkaneko/kaggle_Google_Smartphone_Decimeter_Challenge
# install project
cd kaggle_Google_Smartphone_Decimeter_Challenge
conda create -n gsdc_conv python==3.8.0
yes | bash install.sh
# at my case I need an additional run of `yes | bash install.sh` for installation.
Training/Testing
3 different models
- for conv training,
python train.pyat each branch. Please check thesrc/config/config.yamlfor the training configuration. - for
LightGBM positionyou needmv ./src/notebook/lightgbm_position_prediction.ipynb ./and then starting juypter notebook.
| model | branch | training | test |
|---|---|---|---|
| conv stft segmentation | main | ./train.py | ./test.py |
| conv position | conv_position | ./train.py | ./test.py |
| LightGBM position | main | ./src/notebook/lightgbm_position_prediction.ipynb | included training notebook |
Testing
10th place solution trained weights
I've uploaded pretrained weights as kaggle dataset, here.
So extract it on ./ and you can see ./model_weights. And then running python test.py yields submission.csv. This csv will score
~2.61 at kaggle private dataset, which equals to 10th place.
your trained weights
For conv stft segmentation please change paths at the config, src/config/test_weights/compe_sub_github.yaml,
and then run followings.
# at main branch
python test.py \
conv_pred_path="your conv position prediction csv path"\
gbm_pred_path="your lightgbm position prediction path"
Regarding, conv_pred_path and gbm_pred_path, you need to create each prediction csv with the table above
before run this code. Or you can use mv prediction results on the same kaggle dataset as pretrained weights.
License
Code
Apache 2.0
GitHub
https://github.com/Fkaneko/kaggle_Google_Smartphone_Decimeter_Challenge







