AVP-SLAM-SIM
A basic implementation of AVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot(IROS 2020) in simulation.
Respect to AVP-SLAM project -> Tong Qin, Tongqing Chen, Yilun Chen, and Qing Su
About The Project
This project is only my implementation of the Paper, not official release , we only release our simulation codes. Other Code will be released soon
CodeStructure
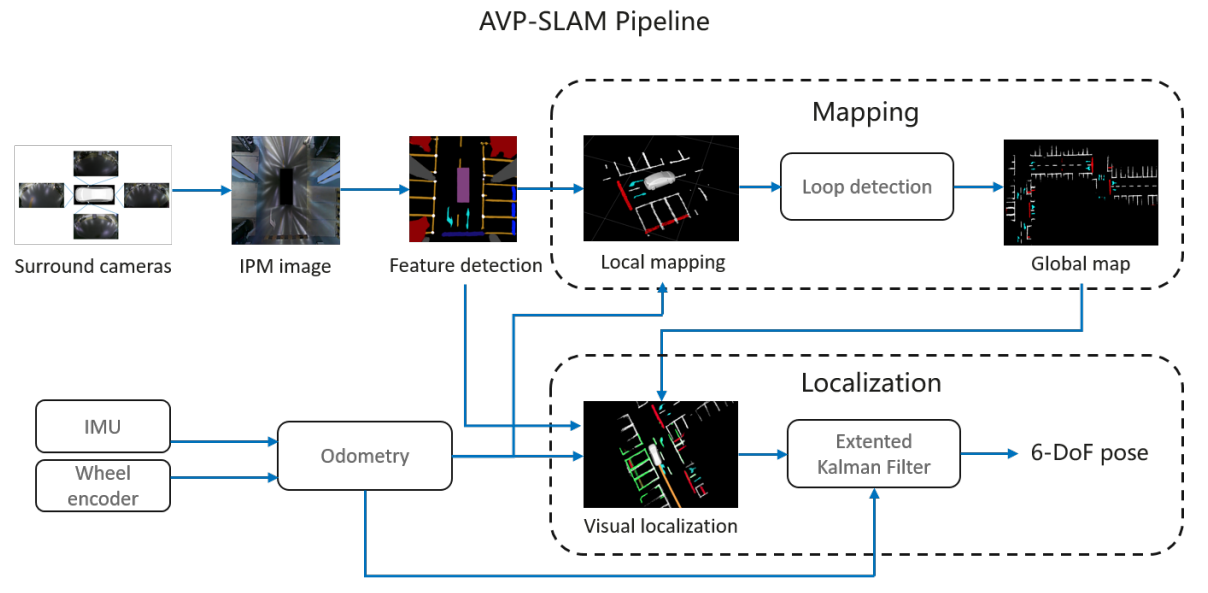
We release our basic code structure, for the whole project, you need at least calib,segmentation,avp-bev,sync part etc. avp-bev is one of the core parts of this project, The struct show in the figure:

If you are intrested in this project, you can follow the ***.h files to relize your implementation.
How to run
This project provide a gazebo world. so if you wanna test the code, you need prepare the simulation world.
This project need a gazebo environment, Usually loading the gazebo models takes long time, so we need to download the models first and put them in ~/.gazebo/models/.
Follow this link,Download the models from BaiDu YUN, The extract code cmxc, and unzip them in ~/.gazebo/models/. or you can Download the models Google Drive LINK.
mkdir -p ~/catkin_ws/src && cd catkin_ws/src
git clone https://github.com/TurtleZhong/AVP-SLAM-SIM.git
cd gazebo_files/
unzip my_ground_plane.zip -d ~/.gazebo/models/
cd ../
catkin init && catkin config -DCMAKE_BUILD_TYPE=Release
catkin build
source devel/setup.bash
roslaunch avp_gazebo single_simulated_avp.launch
Ubuntu 16.04
sudo apt-get install ros-kinetic-gmapping ros-kinetic-navigation
sudo apt-get install ros-kinetic-kobuki ros-kinetic-kobuki-core ros-kinetic-kobuki-gazebo
Ubuntu 18.04
sudo apt-get install ros-melodic-kobuki-*
cd ~/catkin_ws/src
git clone https://github.com/yujinrobot/kobuki_desktop.git
catkin build
Acyually If you test the code fail in your env(ubuntu 18.04), I recomend you use Ubuntu 16.04 for test and I will provide A DOCKER ENV - TODO
DockerENV
If everything is OK, you will get this: