Yolov3-Polygon
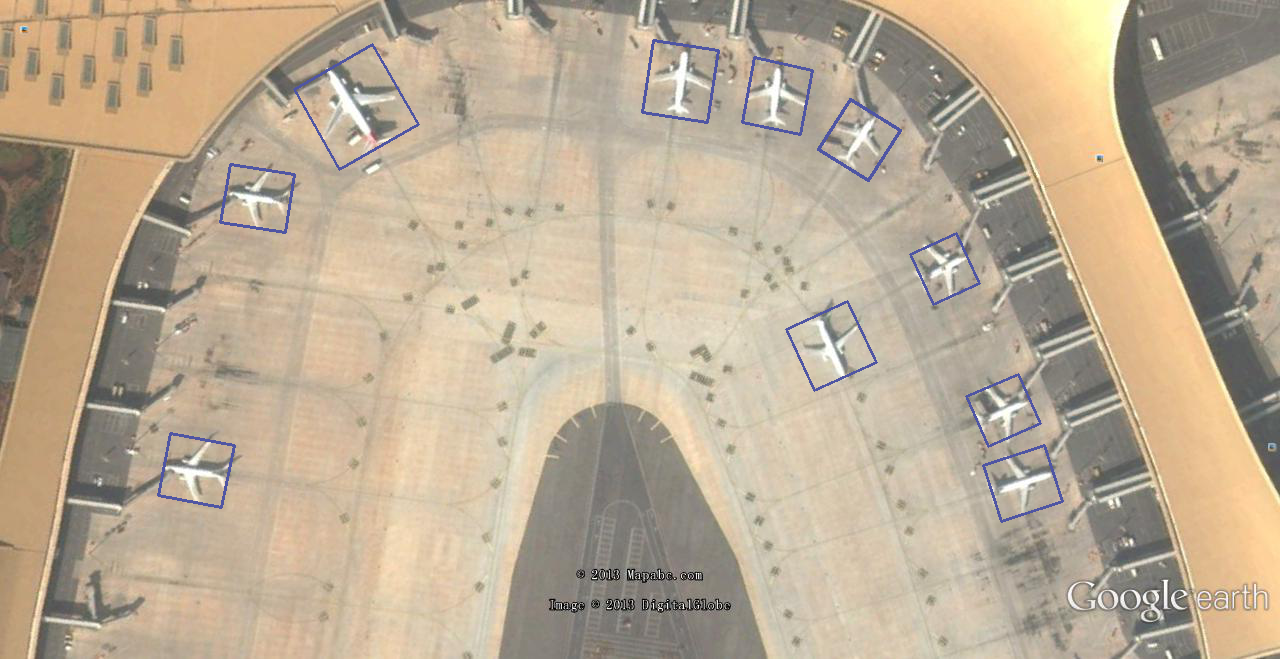
This is a implementation of rotation object detecion based on YOLOv3-quadrangle. I upgraded it to support pytorch 1.1 or higher and fix some bugs. Object detection in arbitrary orientations is achieved by detecting four corner points, the model has been tested on remote sensing dataset UCAS-AOD.
training
dataset
The annotations of your own dataset need to be converted into DOTA format.
imagesets
Generate imageset file via utils/generate_imageset.py
config
Run utils/kmeans.py to generate preset anchors.
Modify two parts in cfg/yolov3.cfg : 1. classes 2. conv filter before yolo layer should be (8+cls+1)*3.
Modify training sets in .data file.
Modify classnames in data/*.names.
eval
prepare labels:
python datasets/UCAS_AOD/ucas_aod2gt.py
conduct evaluation:
python eval.py
detect
python detect.py
Detections