omega_format
This module is developed by ika - RWTH Aachen as a contribution to the VVM project which aims to develop test procedures and to provide frameworks and methods for the safety verification of automated vehicles. VVM is working on the use case of Urban Intersections and focuses on driving functions up to full automation of vehicles (SAE Level 4 and 5).
As part of the project a data format for storing reference and perception data from pilotings, test drives and simulation in urban traffic is developed. This module enables the creation, reading and visualization of data conforming to this data format. Additionally, it can check files for conformance and perform basic sanity checks on the data.
Data Format
The base of both, the reference data format and the perception data format is the HDF5 file format. This library utilizes h5py to interact with those.
Reference Data
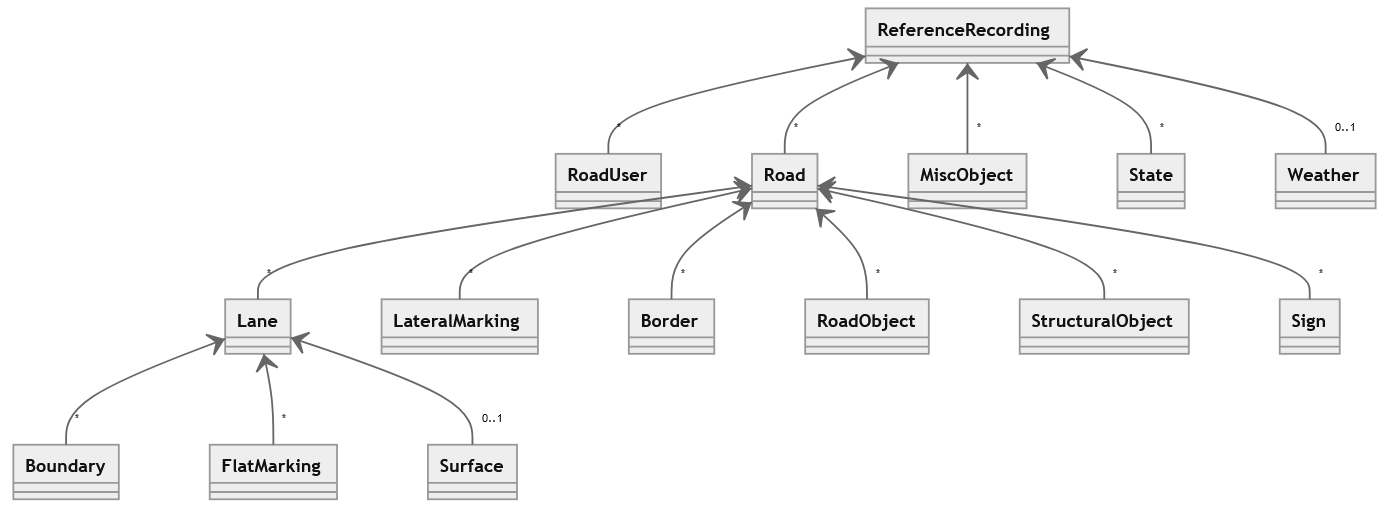
The OMEGA Format reference recording format is used to store data that represents the 'true' state of road users, infrastructure information, weather and more during a piloting, testing or simulation. The representation is on an object list basis.
The following diagram shows an overview of the hierarchy in the OMEGA Format reference recording format. A more detailed description can be found in the specification document and the signal list.
Perception Data
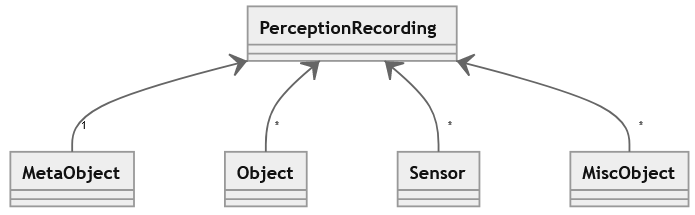
The PerceptionRecording format is used to store data that represents what a vehicle under test, sensor under test or similar perceives from its surroundings. It is designed to be compared against the ReferenceRecording format. The following diagram shows an overview of the hierarchy in the PerceptionRecording format. A more detailed description is coming soon.
Installation
The dependencies are managed with conda environments. Conda can be installed following the conda installation instructions.
To create a new conda environment omega_env and install the module run the following in your console:
conda env create -n omega_env -f environment_visualization.yml
conda activate omega_env
If you want an editable install (modifications to the files in the directory are immediately used by the module) run:
pip install -e .[visualization]
To update the existing environment upon addition of new dependencies:
conda env update -n omega_env -f environment_visualization.yml
Usage
Validate your data
To check if your file conforms to the specification run.
omega_format verify --reference <FILENAME>
or
omega_format verify --perception <FILENAME>
When using the library and creating objects or rading from an hdf5 file, by default, sanity checks are performed. To circumvent those pass validate=False to the from_hdf5 function or use or use cls.construct instead of cls as the constructor of an object. In the backend pydantic is used for the sanity checks.
Visualize your data
To visualize a data file execute the following in your conda environment:
omega_format visualize --snip --max-snippets=2 <FILENAME>
or in Python:
import omega_format
from omega_format.visualization import Visualizer, SnippetContainer
reference_recording = omega_format.ReferenceRecording.from_hdf5('path/to/the/reference_recording_file.hdf5')
visualizer = Visualizer(SnippetContainer.create_list(references=reference_recording))
visualizer.start_gui_and_visualization()
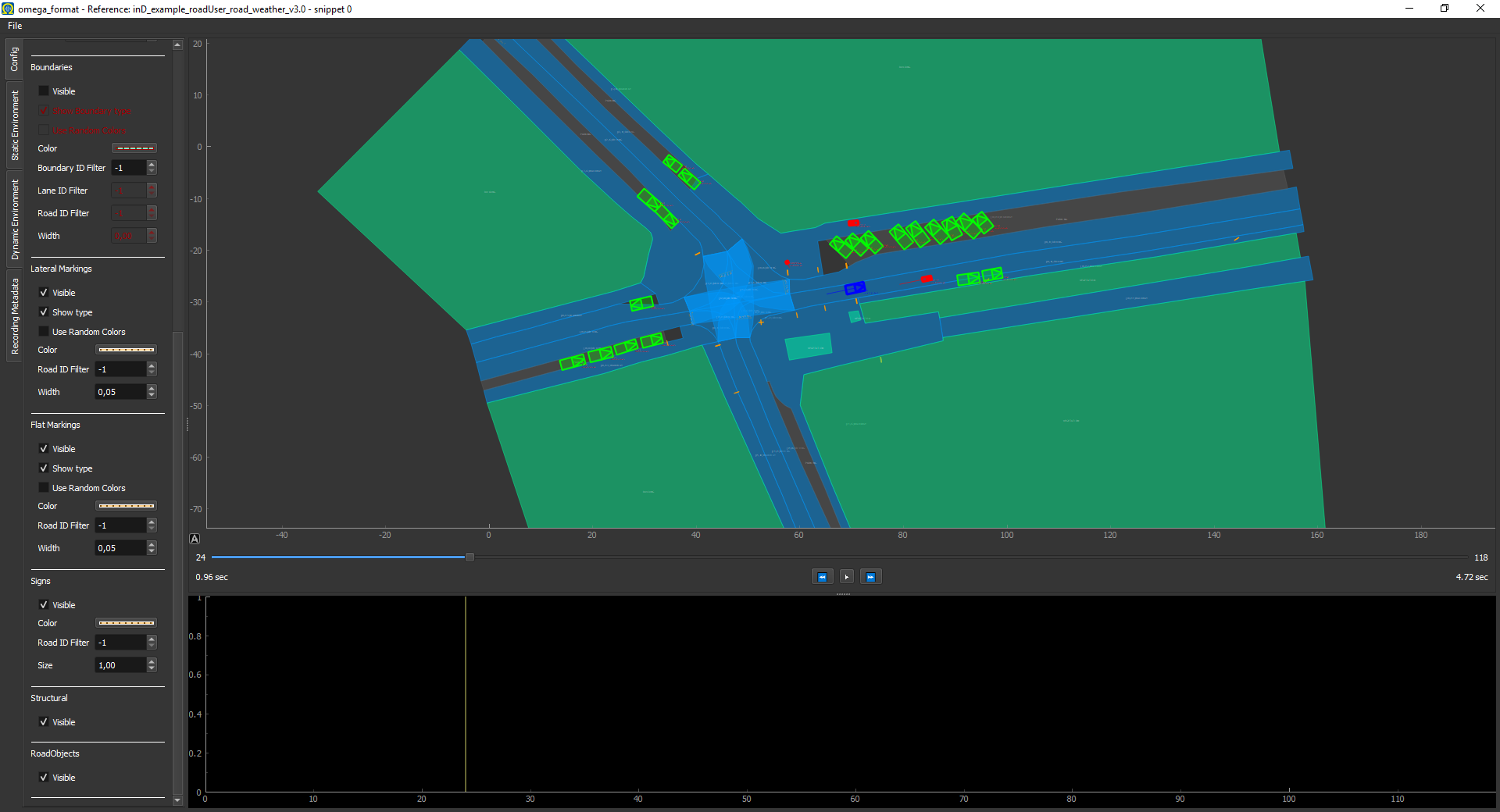
A window will open that lets you interact with and inspect your data.
Extending the visualizer
By subclassing omega_format.visualization.VisualizationModule and adding an instance of your subclass to the visualizers list of the Visualizer you can extend the functionality of the visualizer. The subclass has to implement at least one of the functions visualize_static and visualize_dynamics, returning a list of pyqt widgets to plot. For more details take a look at the omega_format.vis.VisualizationModule or the other modules defined in the visualization.modules directory.
Create a reference data
This module maps the reference and perception data file specifications to a hierarchy of python classes. The root classes are ReferenceRecording and PerceptionRecording respectively. First initializing an object from that class and fill its properties with the objects of the classes in question (e.g. Weather RoadUser, Lane). After adding all your data, call to_hdf5 on the ReferenceRecording or PerceptionRecording and a format compliant hdf5 file will be created for you.
import numpy as np
import omega_format
from datetime import datetime
rr = omega_format.ReferenceRecording(meta_data=omega_format.MetaData(recorder_number=1,
recording_number=1,
daytime=datetime.now()
reference_point_lat=50.786687,
reference_point_lon=6.046312),
timestamps=omega_format.Timestamps(val=np.array([0])),
)
rr.weather = omega_foramt.Weather()
rr.road_users[0] = omega_format.RoadUser(type=omega_format.ReferenceTypes.RoadUser.Type.CAR, sub_type=omega_format.ReferenceTypes.RoadUser.SubType.General.REGULAR,
birth=0, bb=omega_format.BoundingBox(np.array([2,3,0])),
tr=omega_format.Trajectory(pos_x=np.array([0]),pos_y=np.array([0]),pos_z=np.array([0]),
roll=np.array([0]),pitch=np.array([0]),heading=np.array([0])))
rr.roads[0] = omega_format.Road(location=omega_format.ReferenceTypes.RoadLocation.URBAN)
rr.to_hdf5('test.hdf5')