pySLAM
pySLAM is a 'toy' implementation of a monocular Visual Odometry (VO) pipeline in Python. I released it for educational purposes, for a computer vision class I taught. I started developing it for fun as a python programming exercise, during my free time. I took inspiration from some python repos available on the web.
Main Scripts:
-
main_vo.pycombines the simplest VO ingredients without performing any image point triangulation or windowed bundle adjustment. At each step $k$,main_vo.pyestimates the current camera pose $C_k$ with respect to the previous one $C_{k-1}$. The inter frame pose estimation returns $[R_{k-1,k},t_{k-1,k}]$ with $||t_{k-1,k}||=1$. With this very basic approach, you need to use a ground truth in order to recover a correct inter-frame scale $s$ and estimate a valid trajectory by composing $C_k = C_{k-1} * [R_{k-1,k}, s t_{k-1,k}]$. This script is a first start to understand the basics of inter frame feature tracking and camera pose estimation. -
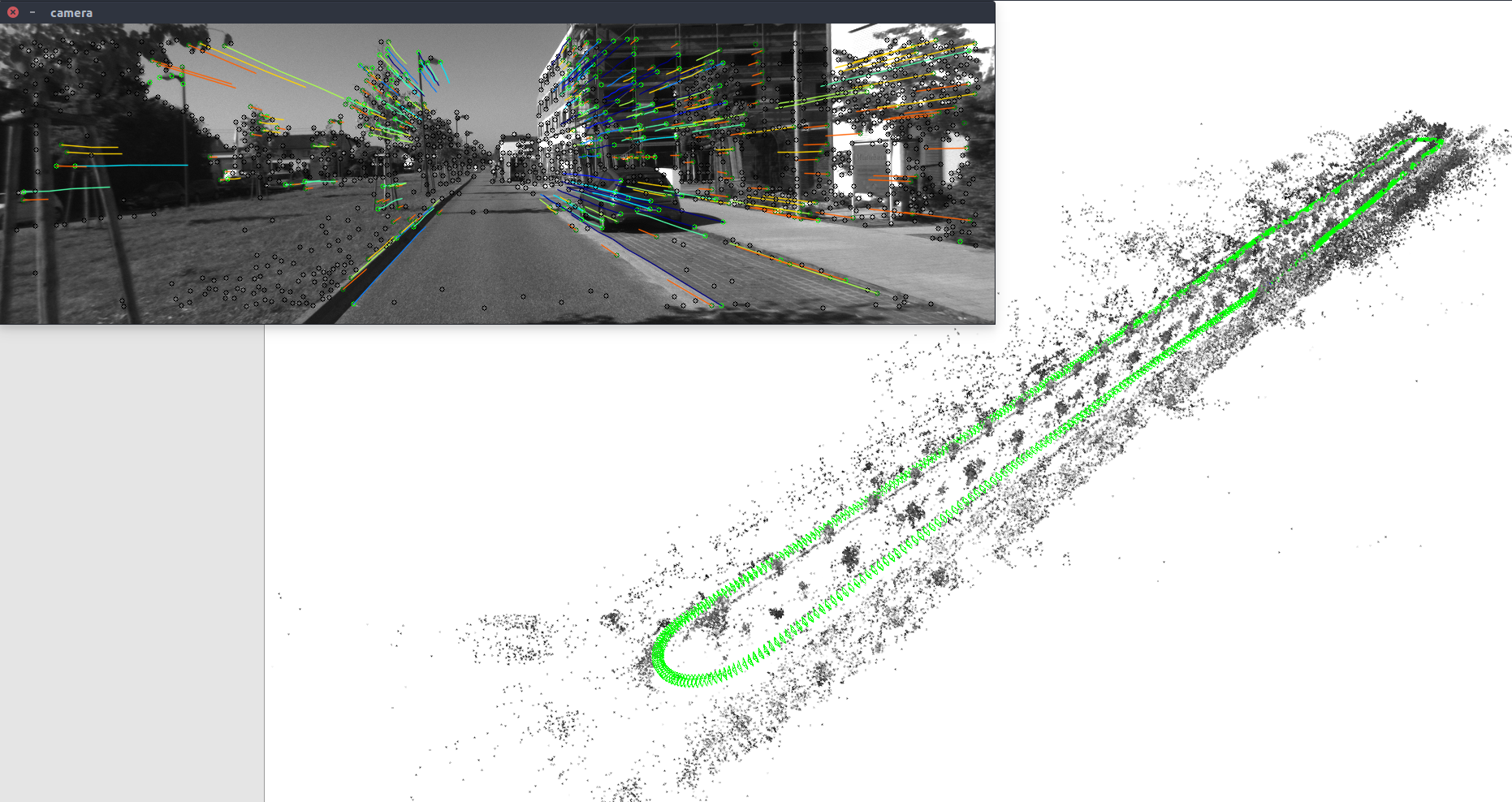
main_slam.pyadds feature tracking along multiple frames, point triangulation and bundle adjustment in order to estimate the camera trajectory up-to-scale and build a map. It's still a VO pipeline but it shows some basic blocks which are necessary to develop a real visual SLAM pipeline.
You can use this 'toy' framework as a baseline to play with VO techniques or create your own (proof of concept) VO/SLAM pipeline in python. When you test it, please, consider that's intended as a simple 'toy' framework, without any pretence of being considered peformant. Check the terminal warnings if you see something weird happening.
Enjoy it!
Requirements
- Python 3 (tested under Python 3.5)
- Numpy
- OpenCV (see below for a suggested python installation)
The framework has been developed and tested under Ubuntu 16.04. You may need to install some required python3 packages. These packages can be easily and automatically installed by running:
$ ./install_pip3_packages.sh
If you want to run main_slam.py you have to install the libs:
These libs can be easily installed by running the script:
$ ./install_thirdparty.sh
How to install non-free OpenCV modules under Ubuntu
In order to use non-free OpenCV modules (link) under Ubuntu, you can run
$ pip3 install opencv-contrib-python==3.4.0.12
For a more advanced OpenCV installation procedure, you can take a look here.
Problems with ROS and OpenCV?
If you have tried to run the scripts and got the following error (having installed ROS in your system):
ImportError: /opt/ros/kinetic/lib/python2.7/dist-packages/cv2.so:
undefined symbol: PyCObject_Type
you can run the following command in your shell:
$ export PYTHONPATH=""
this will remove the ROS OpenCV python modules from your python path and will solve the issue.
Usage
You can test the code right away by running:
$ python3 -O main_vo.py
This will process a KITTI video (available in the folder videos) by using its corresponding camera calibration file (available in the folder settings), and its groundtruth (available in the video folder).
N.B.: as explained above, the script main_vo.py strictly requires a ground truth.
In order to process a different dataset, you need to set the file config.ini:
- select your dataset
typein the section[DATASET](see the section Datasets below for further details) - the camera settings file accordingly (see the section Camera Settings below)
- the groudtruth file accordingly (see the section Datasets below and the files
ground_truth.pyandconvert_groundtruth.py)
If you want to test the script main_slam.py, you can run:
$ python3 -O main_slam.py
You can choose any detector/descriptor among ORB, SIFT, SURF, BRISK, AKAZE (see below for further information).
WARNING: the available KITTI videos (due to information loss in video compression) make main_slam tracking peform worse than with the original KITTI image sequences. The available videos are intended to be used for a first quick test. Please, download and use the original KITTI image sequences as explained below. For instance, on the original KITTI sequence 06, main_slam successfully completes the round; at present time, this does not happen with the compressed video.
Datasets
You can use 4 different types of datasets:
| Dataset | type in config.ini |
|---|---|
| KITTI odometry data set (grayscale, 22 GB) | type=KITTI_DATASET |
| TUM dataset | type=TUM_DATASET |
| video file | type=VIDEO_DATASET |
| folder of images | type=FOLDER_DATASET |
KITTI Datasets
pySLAM code expects the following structure in the specified KITTI path folder (specified in the section [KITTI_DATASET] of the file config.ini). :
├── sequences
├── 00
...
├── 21
├── poses
├── 00.txt
...
├── 10.txt
-
Download the dataset (grayscale images) from http://www.cvlibs.net/datasets/kitti/eval_odometry.php and prepare the KITTI folder as specified above
-
Select the corresponding calibration settings file (parameter
[KITTI_DATASET][cam_settings]in the fileconfig.ini)
TUM Datasets
pySLAM code expects a file associations.txt in each TUM dataset folder (specified in the section [TUM_DATASET] of the file config.ini).
-
Download a sequence from http://vision.in.tum.de/data/datasets/rgbd-dataset/download and uncompress it.
-
Associate RGB images and depth images using the python script associate.py. You can generate your
associations.txtfile by executing:
$ python associate.py PATH_TO_SEQUENCE/rgb.txt PATH_TO_SEQUENCE/depth.txt > associations.txt
- Select the corresponding calibration settings file (parameter
[TUM_DATASET][cam_settings]in the fileconfig.ini)
Camera Settings
The folder settings contains the camera settings files which can be used for testing the code. These are the same used in the framework ORBSLAM2. You can easily modify one of those files for creating your own new calibration file (for your new datasets).
In order to calibrate your camera, you can use the scripts in the folder calibration and you may want to have a look here. In particular:
- use the script
grab_chessboard_images.pyto collect a sequence of images where the chessboard can be detected (set the chessboard size there) - use the script
calibrate.pyto process the collected images and compute the calibration parameters (set the chessboard size there)
Detectors/Descriptors
At present time, the following feature detectors are supported:
- FAST
- Good features to track [ShiTo94]
- ORB
- SIFT
- SURF
- AKAZE
- BRISK
You can take a look at the file feature_detector.py.
The following feature descriptors are supported:
- ORB
- SIFT
- SURF
- AKAZE
- BRISK
In both the scripts main_vo.py and main_slam.py, you can set which detector/descritor to use by means of the function feature_tracker_factory(). This function can be found in the file feature_tracker.py.
References
Suggested books:
- Multiple View Geometry in Computer Vision by Richard Hartley and Andrew Zisserman
- An Invitation to 3-D Vision by Yi-Ma, Stefano Soatto, Jana Kosecka, S. Shankar Sastry
- Computer Vision: Algorithms and Applications, by Richard Szeliski
Suggested material:
- Vision Algorithms for Mobile Robotics by Davide Scaramuzza
- CS 682 Computer Vision by Jana Kosecka
Moreover, you may want to have a look at the OpenCV guide or tutorials.
TODO
Tons of things are still missing to attain a real SLAM pipeline:
- keyframe generation and management
- tracking w.r.t. previous keyframe
- proper local map generation and management (covisibility)
- loop closure
- general relocalization



