rpi_road_object_detection
Repository to run object detection on a model trained on an autonomous driving dataset.
Autonomous Driving Object Detection on the Raspberry Pi 4
This repository contains code and instructions to configure the necessary hardware and software for running autonomous driving object detection on the Raspberry Pi 4!
Details of Software and Neural Network Model for Object Detection:
- Language: Python
- Framework: TensorFlow Lite
- Network: SSD MobileNet-V2
- Training Dataset:Berkely Deep Drive (BBD100K)
The motivation for the Project
The goal of this project was to train a neural network to detect things on the road that an autonomous driving vehicle would see (eg. bus, traffic light, traffic sign, person, bike, truck, motor, car, train, rider).
Then to test the trained network on lightweight hardware (i.e. Raspberry PI 4) to see how it performs in terms of processing speed and detection accuracy.
Additional Resources
- YouTube Turorial For This Repository: https://youtu.be/Zfmo3bMycUg
- Post Describing the Training Procedure: https://ecd1012.medium.com/autonomous-driving-object-detection-on-the-raspberry-pi-4-175bba51d5b4
- Explanation of Machine Learning/Deep Learning/Object Detection: https://www.youtube.com/watch?v=pIciURImE04&t=138s&ab_channel=bitsNblobsElectronics
Source
Reference for Source Code for the Project: https://github.com/EdjeElectronics/TensorFlow-Lite-Object-Detection-on-Android-and-Raspberry-Pi/blob/master/Raspberry_Pi_Guide.md
Special thanks to Evan from EdjeElectronics for the instructions and the majority of the code used in this project! :)
Results
Vehicle Testing Configuration

Core
- Raspberry Pi 4 GB
- Raspberry Pi 5MP Camera (rev 1.3)
Other
- LED
- 470 Ohm Resistor
- Small breadboard
- GPIO push button
- 3.5 Amp USB-C Power Supply
This tissue box setup isn't the greatest, but it's what I used to mount the PI on the dashboard of my car. I then used the USB-C cable plugged into the AC outlet of my car while I drove around to record and process footage.
Issues
1.) If you get an error when trying to run the program showing the following:
ImportError: No module named cv2
Try using this tutorial to install and build opencv: https://pimylifeup.com/raspberry-pi-opencv/
The software setup steps should install OpenCV, but sometimes installing it on the Raspberry Pi can be finicky.
Setting Up Software
1.) Clone Repository:
git clone https://github.com/ecd1012/rpi_road_object_detection.git
2.) Change directory to source code:
cd rpi_road_object_detection
3.) Open command prompt and make sure pi is up to date:
sudo apt-get update && sudo apt-get upgrade
4.) Install virtual environment:
sudo pip3 install virtualenv
5.) Make virtual environment:
python3.7 -m venv TFLite-venv
6.) Activate Environment:
source TFLite-venv/bin/activate
7.) Install the dependencies:
bash get_py_requirements.sh
8.) Make sure the camera module is enabled:
sudo raspi-config
9.) Go to Interface Options and make sure the Pi Camera is enabled.
Setting Up Hardware
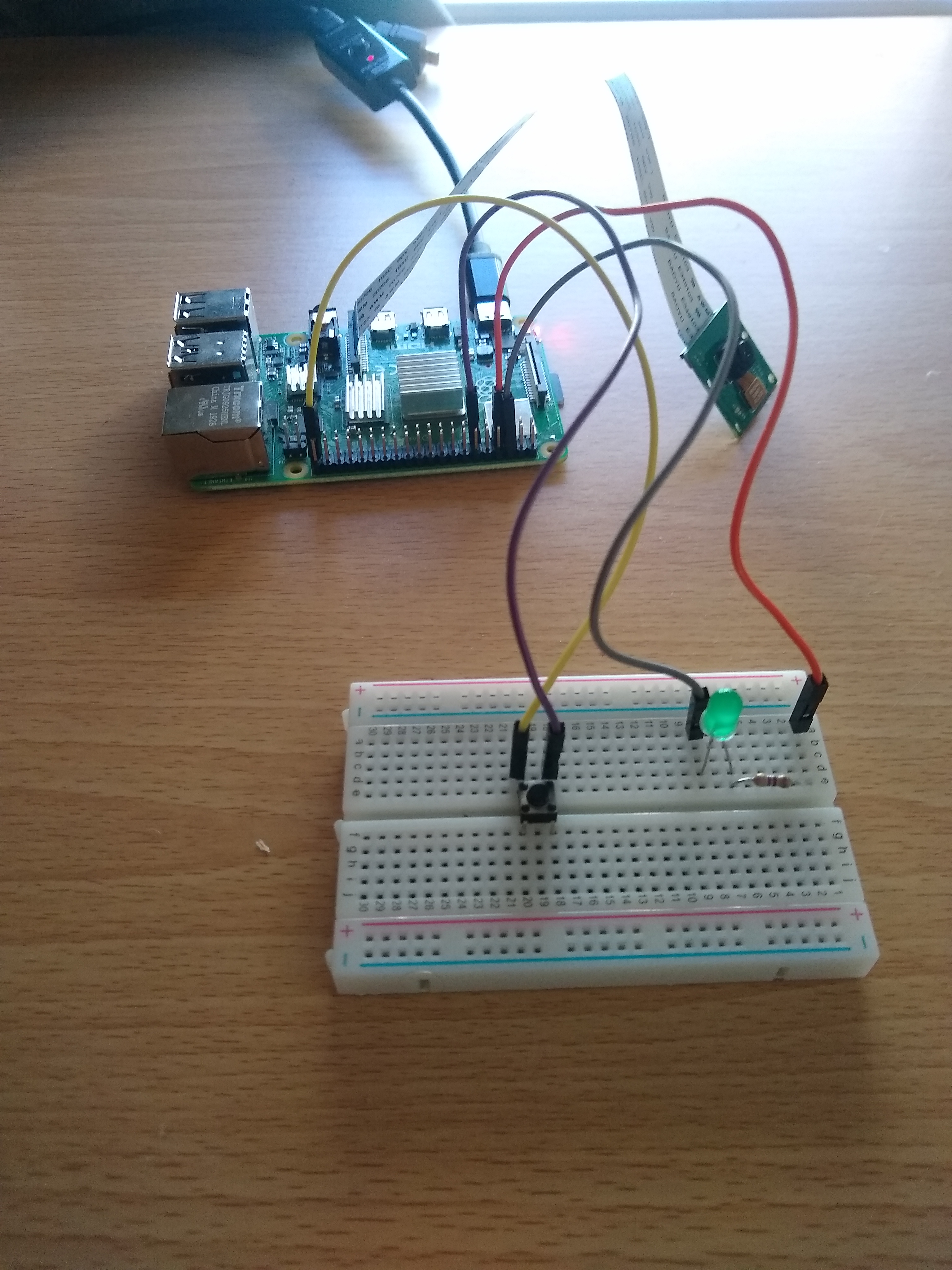
10.) Connect a push button to GPIO pin 17. This will be used as input.
Help: https://www.youtube.com/watch?v=3TDJ4FmtGgk&ab_channel=O'Reilly
11.) Connect an LED to GPIO PIN 4. This LED will turn on to indicate when the program is running. Make sure you use a resistor with the LED!
Help: https://www.youtube.com/watch?v=BWYy3qZ315U&ab_channel=O'Reilly
12.) Connect Pi Camera Module to Raspberry Pi.
Help: https://www.youtube.com/watch?v=0hrF8Wq8SSQ&ab_channel=BINARYUPDATES
Running Detection
15.) After all your hardware and software is configured correctly run the following command:
python TFLite_detection_webcam_loop.py --modeldir=TFLite_model_bbd --output_path=processed_images
Where the --output_path you specify is where you want images saved.
16.) The script will start running and wait for you to press the GPIO input button to start processing the video feed from the camera.
Once you press the button, the green LED will turn on and the pi will start feeding and processing the video stream through the neural network.
Processed images will be saved to the '--output_path' you specified over the command line.
17.) If you like, make a video out of the images.
You can do this with gif making software, video making software, or ffmpeg.
Help: https://stackoverflow.com/questions/24961127/how-to-create-a-video-from-images-with-ffmpeg
18.) Enjoy!! :)
Running on Boot
19.) If you want to start running the python script on boot, do the following:
nano ~/.bashrc
And add the following to the end of your .bashrc
#Change directories to where you cloned the repo
cd ~/rpi_road_object_detection
source TFLite-venv/bin/activate
python TFLite_detection_webcam_loop.py --modeldir=TFLite_model_bbd --output_path=processed_images
Then press CTRL+X and Press Y and enter to save.



