Symplectic Double Pendulum Simulator
Double pendulum simulator using a symplectic Euler’s method. The program calculates the momentum and position of each ball using Hamiltonian formulations, and uses those calculations to adjust the pendulum’s course. This provides a double pendulum that stays stable and more analagous to real-life for longer periods of time, without the need of more complex math/animation modules. Mathematical methods provided in attatched PDF.
Functionality
- Visualization UI that shows scaled changes in pendulum lengths, masses, and starting angles
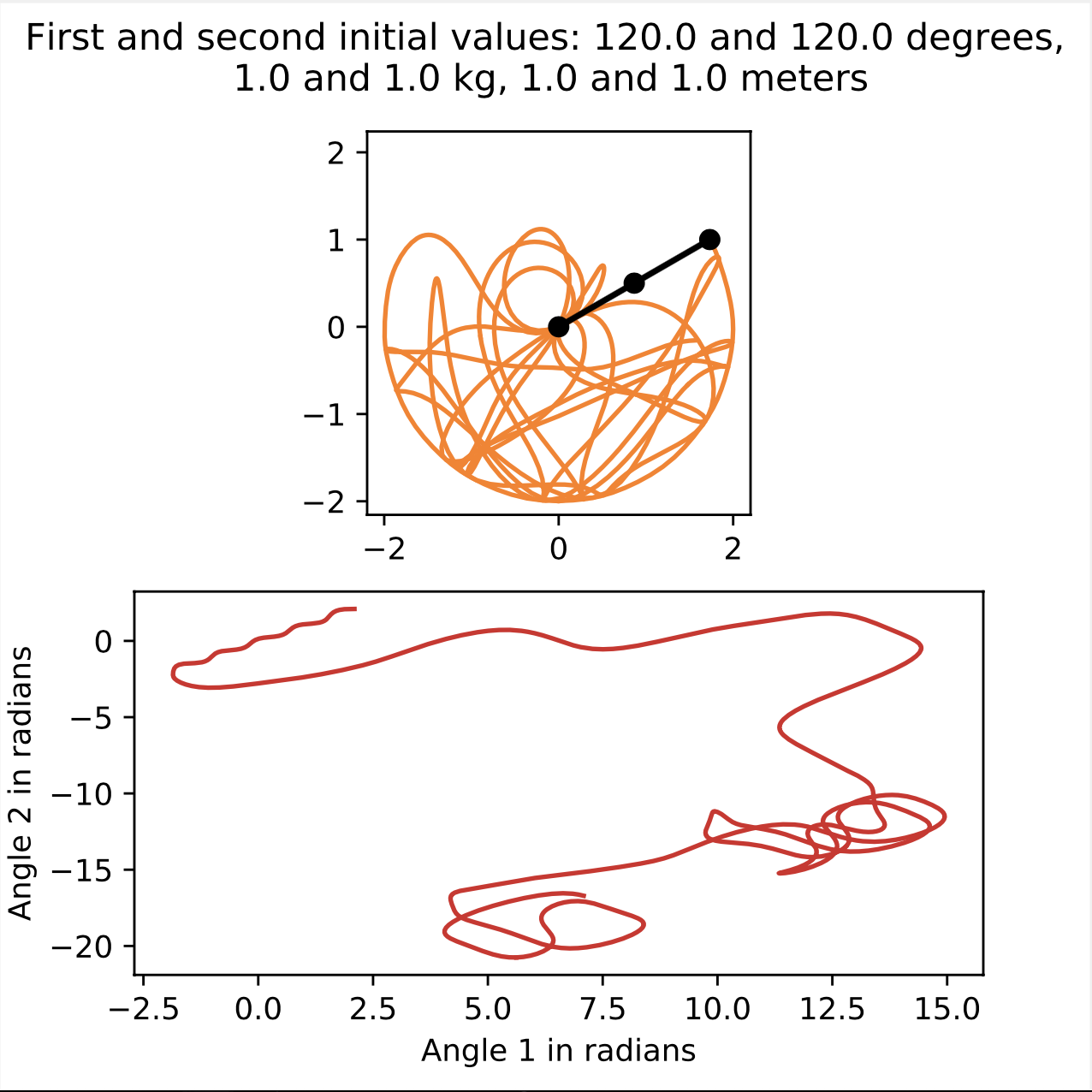
- Generates EPS plot of path and phase diagram on command
- Built to run on a Rasberry Pi/Linux based system
Usage Instructions
Run ./doublependulum.py in Linux terminal. If pendulum animation becomes unstable, the momenta of the masses are most likely too large for the allowed framerate of matplotlib. Try lowering masses or lengthening pendulums.
Required Modules
- numpy
- matplotlib
- threading
- time
Contributors
Scott Marino / [email protected]




