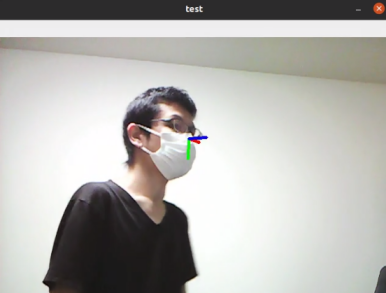
DMHead
Dual model head pose estimation. Fusion of SOTA models. 360° 6D HeadPose detection.
ToDo
https://github.com/choyingw/SynergyNet
-
MobileNetV2 backbone – not retrained


1. Summary

2. Atmosphere
Kazam_screencast_00098_.mp4
3. Benchmark
- Trained on 300W-LP (Custom, Mask-wearing face image augmentation)
- Test on AFLW2000
- June 20, 2022
Yaw: 3.6129, Pitch: 5.5801, Roll: 3.8468, MAE: 4.3466
- June 20, 2022
4. Model Structure
- INPUTS:
Float32 [N,3,224,224] - OUTPUTS:
Float32 [N,3],[Yaw,Roll,Pitch]

5. Citation
@misc{https://doi.org/10.48550/arxiv.2005.10353,
doi = {10.48550/ARXIV.2005.10353},
url = {https://arxiv.org/abs/2005.10353},
author = {Zhou, Yijun and Gregson, James},
title = {WHENet: Real-time Fine-Grained Estimation for Wide Range Head Pose},
publisher = {arXiv},
year = {2020},
}
@misc{hempel20226d,
title={6D Rotation Representation For Unconstrained Head Pose Estimation},
author={Thorsten Hempel and Ahmed A. Abdelrahman and Ayoub Al-Hamadi},
year={2022},
eprint={2202.12555},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
@INPROCEEDINGS{wu2021synergy,
author={Wu, Cho-Ying and Xu, Qiangeng and Neumann, Ulrich},
booktitle={2021 International Conference on 3D Vision (3DV)},
title={Synergy between 3DMM and 3D Landmarks for Accurate 3D Facial Geometry},
year={2021}
}




