fully-convolutional-point-network
End-to-end deep learning on real-world 3D data for semantic segmentation and scene captioning.
Paper by Dario Rethage, Johanna Wald, Jürgen Sturm, Nassir Navab and Federico Tombari.
As of 21.03.2019: Best performing geometry-only method on the ScanNet 3D Semantic Labeling Benchmark
Example
a) Textured mesh (not used) b) Input point cloud c) Semantic voxel segmentation
Features
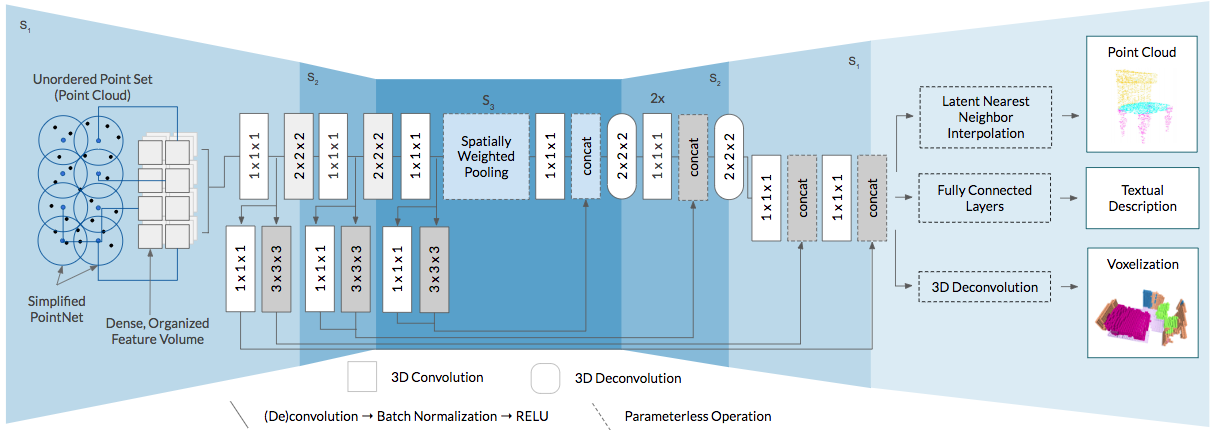
- Hybrid (point-to-voxel) network architecture capable of processing arbitrarily large point clouds in a single pass
- Operates on memory efficient input data representations (meshes/point clouds) while avoiding the redundant propagation of spatial information around points through the network (a limitation of point-based methods)
- Operates on raw sensor data, no pre-processing/encoding necessary
- Produces either an ordered output (voxelization) or maps predictions directly onto the input cloud, thus making it suitable as a general-purpose point cloud descriptor applicable to many 3D tasks
- Evaluated on semantic voxel segmentation, semantic part segmentation and 3D scene captioning tasks
Architecture
Setup
It is recommended to use a virtual environment
git clone https://github.com/drethage/fully-convolutional-point-network.git./setup.sh(installs python depdencies and compiles CUDA ops)
The project has been tested with Tensorflow 1.12, CUDA 9.0, CUDNN 7.4.1 on Ubuntu 16.04 LTS.
Usage
There are three operating modes: training, evaluation and prediction. A JSON-formatted configuration file defines the parameters of an existing or a new session. The structure of this configuration file is described here. Note: this project was originally developed using ScanNet, but is not ScanNet specific. Minimal effort should be required to traing and evaluate this method on new datasets.
Training
Training sessions are differentiated from one another by a session ID defined in config.json. All artifacts generated during training are placed in a folder corresponding to this session ID in the sessions/ folder.
To start training: python main.py --mode train --config <path_to_config_file>. Training will begin after the dataset is prepared for training (a cache will be saved to disk).
Alternatively, there is a pre-trained model available in the sessions/ folder for quickly trying out on your own data.
Evaluation
To evaluate a model we present every item in the validation set to the most recent checkpoint present in a session folder, and calculate the intersection-over-union (IoU) over all learnable classes.
To begin evaluation: python main.py --mode evaluate --config <path_to_config_file>. Note: --config should contain the path to a configuration file in a session folder. Optionally, specify which device to use by setting the --device flag to cpu or gpu.
Prediction
After training and evaluating a model, we may wish to predict on unseen data.
To predict on a new mesh or point cloud: python main.py --mode predict --config <path_to_config_file> --file <path_to_PLY_file>. Optionally, specify which device to use by setting the --device flag to cpu or gpu. Optionally, use a custom set of colors to represent distinct classes by giving the path to a colors.txt file via --colors.
Citation
If you find our work useful, please consider citing:
@inproceedings{rethage2018eccv,
author = {Rethage, D., Wald, J. Sturm, J. Navab, N., Tombari, F.},
title = {Fully-Convolutional Point Networks for Large-Scale Point Clouds},
booktitle = {European Conference on Computer Vision (ECCV)},
year = {2018}
}
Updates
- March 2019: Pre-trained model published for Semantic Voxel Segmentation
- February 2019: Code published for Semantic Voxel Segmentation
- September 2018: Paper published



