Puzzle-CAM
The official implementation of "Puzzle-CAM: Improved localization via matching partial and full features".
Citation
- Accepted to ICIP 2021
- Please cite our paper if the code is helpful to your research. arxiv
@article{jo2021puzzle,
title={Puzzle-CAM: Improved localization via matching partial and full features},
author={Jo, Sanghyun and Yu, In-Jae},
journal={arXiv preprint arXiv:2101.11253},
year={2021}
}
Abstract
Weakly-supervised semantic segmentation (WSSS) is introduced to narrow the gap for semantic segmentation performance from pixel-level supervision to image-level supervision.
Most advanced approaches are based on class activation maps (CAMs) to generate pseudo-labels to train the segmentation network.
The main limitation of WSSS is that the process of generating pseudo-labels from CAMs which use an image classifier is mainly focused on the most discriminative parts of the objects.
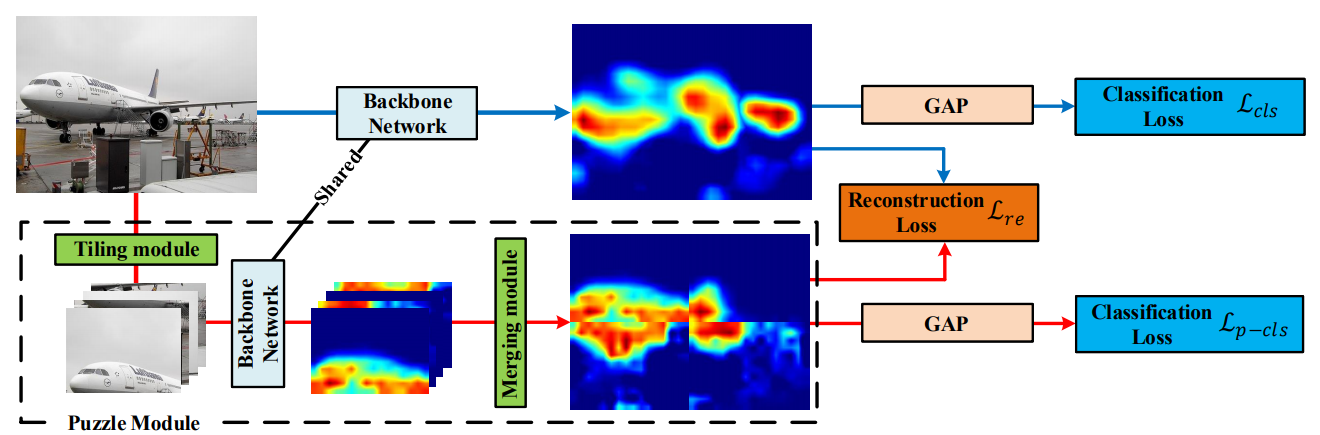
To address this issue, we propose Puzzle-CAM, a process minimizes the differences between the features from separate patches and the whole image.
Our method consists of a puzzle module (PM) and two regularization terms to discover the most integrated region of in an object.
Without requiring extra parameters, Puzzle-CAM can activate the overall region of an object using image-level supervision.
In experiments, Puzzle-CAM outperformed previous state-of-the-art methods using the same labels for supervision on the PASCAL VOC 2012 test dataset.
Overview
Prerequisite
- Python 3.8, PyTorch 1.7.0, and more in requirements.txt
- CUDA 10.1, cuDNN 7.6.5
- 4 x Titan RTX GPUs
Usage
Install python dependencies
python3 -m pip install -r requirements.txt
Download PASCAL VOC 2012 devkit
Follow instructions in http://host.robots.ox.ac.uk/pascal/VOC/voc2012/#devkit
1. Train an image classifier for generating CAMs
CUDA_VISIBLE_DEVICES=0,1,2,3 python3 train_classification_with_puzzle.py --architecture resnest101 --re_loss_option masking --re_loss L1_Loss --alpha_schedule 0.50 --alpha 4.00 --tag ResNeSt101@Puzzle@optimal --data_dir $your_dir
2. Apply Random Walk (RW) to refine the generated CAMs
2.1. Make affinity labels to train AffinityNet.
CUDA_VISIBLE_DEVICES=0 python3 inference_classification.py --architecture resnest101 --tag ResNeSt101@Puzzle@optimal --domain train_aug --data_dir $your_dir
python3 make_affinity_labels.py --experiment_name ResNeSt101@Puzzle@optimal@train@scale=0.5,1.0,1.5,2.0 --domain train_aug --fg_threshold 0.40 --bg_threshold 0.10 --data_dir $your_dir
2.2. Train AffinityNet.
CUDA_VISIBLE_DEVICES=0 python3 train_affinitynet.py --architecture resnest101 --tag AffinityNet@ResNeSt-101@Puzzle --label_name ResNeSt101@Puzzle@optimal@train@scale=0.5,1.0,1.5,2.0@aff_fg=0.40_bg=0.10 --data_dir $your_dir
3. Train the segmentation model using the pseudo-labels
3.1. Make segmentation labels to train segmentation model.
CUDA_VISIBLE_DEVICES=0 python3 inference_rw.py --architecture resnest101 --model_name AffinityNet@ResNeSt-101@Puzzle --cam_dir ResNeSt101@Puzzle@optimal@train@scale=0.5,1.0,1.5,2.0 --domain train_aug --data_dir $your_dir
python3 make_pseudo_labels.py --experiment_name AffinityNet@ResNeSt-101@Puzzle@train@beta=10@exp_times=8@rw --domain train_aug --threshold 0.35 --crf_iteration 1 --data_dir $your_dir
3.2. Train segmentation model.
CUDA_VISIBLE_DEVICES=0,1,2,3 python3 train_segmentation.py --backbone resnest101 --mode fix --use_gn True --tag DeepLabv3+@ResNeSt-101@Fix@GN --label_name AffinityNet@ResNeSt-101@Puzzle@train@beta=10@exp_times=8@rw@crf=1 --data_dir $your_dir
4. Evaluate the models
CUDA_VISIBLE_DEVICES=0 python3 inference_segmentation.py --backbone resnest101 --mode fix --use_gn True --tag DeepLabv3+@ResNeSt-101@Fix@GN --scale 0.5,1.0,1.5,2.0 --iteration 10
python3 evaluate.py --experiment_name DeepLabv3+@ResNeSt-101@Fix@GN@val@scale=0.5,1.0,1.5,2.0@iteration=10 --domain val --data_dir $your_dir/SegmentationClass
5. Results
Qualitative segmentation results on the PASCAL VOC 2012 validation set.
Top: original images. Middle: ground truth. Bottom: prediction of the segmentation model trained using the pseudo-labels from Puzzle-CAM.

| Methods | background | aeroplane | bicycle | bird | boat | bottle | bus | car | cat | chair | cow | diningtable | dog | horse | motorbike | person | pottedplant | sheep | sofa | train | tvmonitor | mIoU |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Puzzle-CAM with ResNeSt-101 | 88.9 | 87.1 | 38.7 | 89.2 | 55.8 | 72.8 | 89.8 | 78.9 | 91.3 | 26.8 | 84.4 | 40.3 | 88.9 | 81.9 | 83.1 | 34.0 | 60.1 | 83.6 | 47.3 | 59.6 | 38.8 | 67.7 |
| Puzzle-CAM with ResNeSt-269 | 91.1 | 87.2 | 37.3 | 86.8 | 61.4 | 71.2 | 92.2 | 86.2 | 91.8 | 28.6 | 85.0 | 64.1 | 91.8 | 82.0 | 82.5 | 70.7 | 69.4 | 87.7 | 45.4 | 67.0 | 37.7 | 72.2 |




