PointDSC repository
PyTorch implementation of PointDSC for CVPR'2021 paper "PointDSC: Robust Point Cloud Registration using Deep Spatial Consistency", by Xuyang Bai, Zixin Luo, Lei Zhou, Hongkai Chen, Lei Li, Zeyu Hu, Hongbo Fu and Chiew-Lan Tai.
This paper focus on outlier rejection for 3D point clouds registration. If you find this project useful, please cite:
@article{bai2021pointdsc,
title={{PointDSC}: {R}obust {P}oint {C}loud {R}egistration using {D}eep {S}patial {C}onsistency},
author={Xuyang Bai, Zixin Luo, Lei Zhou, Hongkai Chen, Lei Li, Zeyu Hu, Hongbo Fu and Chiew-Lan Tai},
journal={CVPR},
year={2021}
}
Introduction
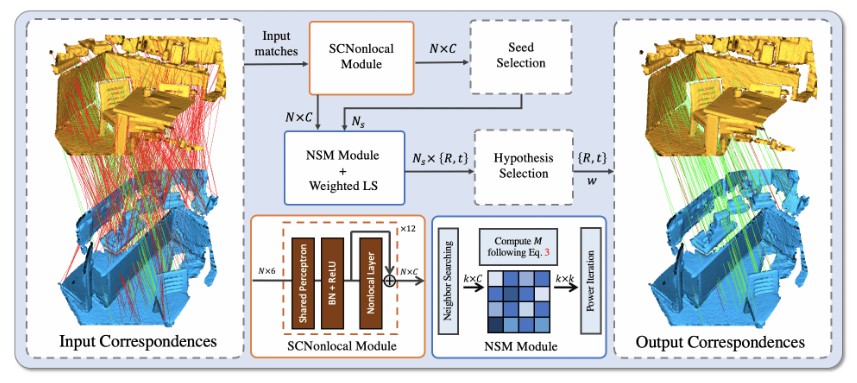
Removing outlier correspondences is one of the critical steps for successful feature-based point cloud registration. Despite the increasing popularity of introducing deep learning techniques in this field, spatial consistency, which is essentially established by a Euclidean transformation between point clouds, has received almost no individual attention in existing learning frameworks. In this paper, we present PointDSC, a novel deep
neural network that explicitly incorporates spatial consistency for pruning outlier correspondences. First, we propose a nonlocal feature aggregation module, weighted by both feature and spatial coherence, for feature embedding of the input correspondences.
Second, we formulate a differentiable spectral matching module, supervised by pairwise spatial compatibility, to estimate the inlier confidence of each correspondence from the embedded features.
With modest computation cost, our method outperforms the state-of-the-art hand-crafted and learning-based outlier rejection approaches on several real-world datasets by a significant margin. We also show its wide applicability by combining PointDSC with different 3D local descriptors.
Requirements
If you are using conda, you may configure PointDSC as:
conda env create -f environment.yml
conda activate pointdsc
If you also want to use FCGF as the 3d local descriptor, please install MinkowskiEngine v0.5.0 and download the FCGF model (pretrained on 3DMatch) from here.
Demo
We provide a small demo to extract dense FPFH descriptors for two point cloud, and register them using PointDSC. The ply files are saved in the demo_data folder, which can be replaced by your own data. Please use model pretrained on 3DMatch for indoor RGB-D scans and model pretrained on KITTI for outdoor LiDAR scans. To try the demo, please run
python demo_registration.py --chosen_snapshot [PointDSC_3DMatch_release/PointDSC_KITTI_release] --descriptor [fcgf/fpfh]
For challenging cases, we recommend to use learned feature descriptors like FCGF or D3Feat.
Dataset Preprocessing
3DMatch
The raw point clouds of 3DMatch can be downloaded from FCGF repo. The test set point clouds and the ground truth poses can be downloaded from 3DMatch Geometric Registration website.
Please make sure the data folder contains the following:
.
├── fragments
│ ├── 7-scene-redkitechen/
│ ├── sun3d-home_at-home_at_scan1_2013_jan_1/
│ └── ...
├── gt_result
│ ├── 7-scene-redkitechen-evaluation/
│ ├── sun3d-home_at-home_at_scan1_2013_jan_1-evaluation/
│ └── ...
├── threedmatch
│ ├── *.npz
│ └── *.txt
To reduce the training time, we pre-compute the 3D local descriptors (FCGF or FPFH) so that we can directly build the input correspondence using NN search during training. Please use misc/cal_fcgf.py or misc/cal_fpfh.py to extract FCGF or FPFH descriptors. Here we provide the pre-computed descriptors for the 3DMatch test set.
KITTI
The raw point clouds can be download from KITTI Odometry website. Please follow the similar steps as 3DMatch dataset for pre-processing.
Augmented ICL-NUIM
Data can be downloaded from Redwood website. Details can be found in multiway/README.md
Pretrained Model
We provide the pre-trained model of 3DMatch in snapshot/PointDSC_3DMatch_release and KITTI in snapshot/PointDSC_KITTI_release.
Instructions to training and testing
3DMatch
The training and testing on 3DMatch dataset can be done by running
python train_3dmatch.py
python evaluation/test_3DMatch.py --chosen_snapshot [exp_id] --use_icp False
where the exp_id should be replaced by the snapshot folder name for testing (e.g. PointDSC_3DMatch_release). The testing results will be saved in logs/. The training config can be changed in config.py. We also provide the scripts to test the traditional outlier rejection baselines on 3DMatch in baseline_scripts/baseline_3DMatch.py.
KITTI
Similarly, the training and testing of KITTI data set can be done by running
python train_KITTI.py
python evaluation/test_KITTI.py --chosen_snapshot [exp_id] --use_icp False
We also provide the scripts to test the traditional outlier rejection baselines on KITTI in baseline_scripts/baseline_KITTI.py.
Augmemented ICL-NUIM
The detailed guidance of evaluating our method in multiway registration tasks can be found in multiway/README.md
3DLoMatch
We also evaluate our method on a recently proposed benchmark 3DLoMatch following OverlapPredator,
python evaluation/test_3DLoMatch.py --chosen_snapshot [exp_id] --descriptor [fcgf/predator] --num_points 5000
If you want to evaluate predator descriptor with PointDSC, you first need to follow the offical instruction of OverlapPredator to extract the features.
Contact
If you run into any problems or have questions, please create an issue or contact [email protected]
Acknowledgments
We thank the authors of
for open sourcing their methods.








