Batch_Instance_Normalization-Tensorflow
Simple Tensorflow implementation of Batch-Instance Normalization for Adaptively Style-Invariant Neural Networks (NIPS 2018)
Code
import tensorflow as tf
def batch_instance_norm(x, scope='batch_instance_norm'):
with tf.variable_scope(scope):
ch = x.shape[-1]
eps = 1e-5
batch_mean, batch_sigma = tf.nn.moments(x, axes=[0, 1, 2], keep_dims=True)
x_batch = (x - batch_mean) / (tf.sqrt(batch_sigma + eps))
ins_mean, ins_sigma = tf.nn.moments(x, axes=[1, 2], keep_dims=True)
x_ins = (x - ins_mean) / (tf.sqrt(ins_sigma + eps))
rho = tf.get_variable("rho", [ch], initializer=tf.constant_initializer(1.0), constraint=lambda x: tf.clip_by_value(x, clip_value_min=0.0, clip_value_max=1.0))
gamma = tf.get_variable("gamma", [ch], initializer=tf.constant_initializer(1.0))
beta = tf.get_variable("beta", [ch], initializer=tf.constant_initializer(0.0))
x_hat = rho * x_batch + (1 - rho) * x_ins
x_hat = x_hat * gamma + beta
return x_hat
Usage
with tf.variable_scope('network') :
x = conv(x, scope='conv_0')
x = batch_instance_norm(x, scope='bin_norm_0')
x = relu(x)
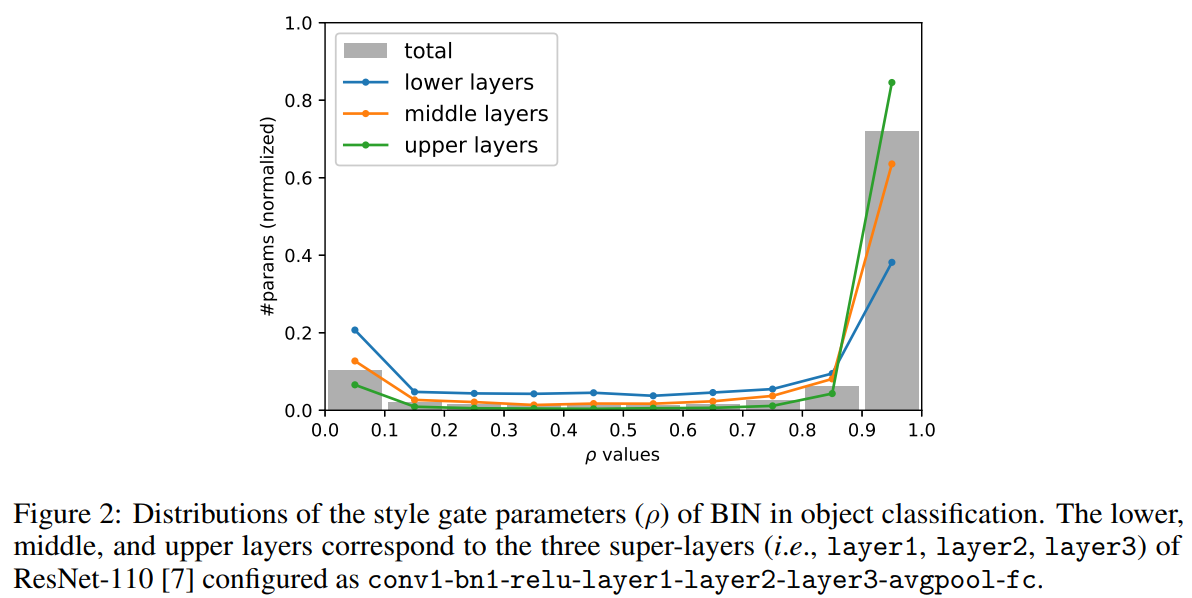
Distribution of ρ
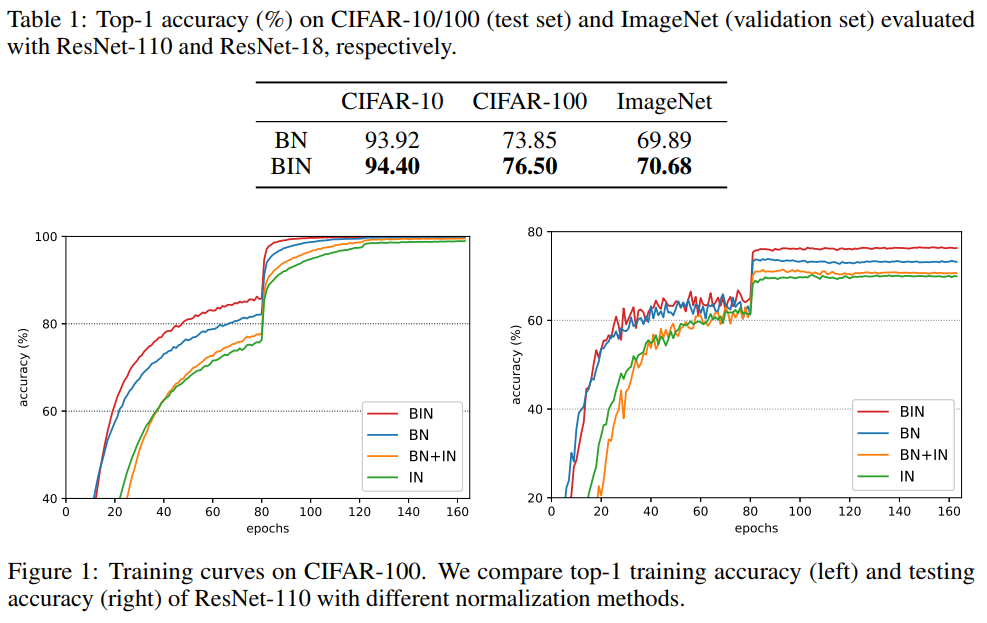
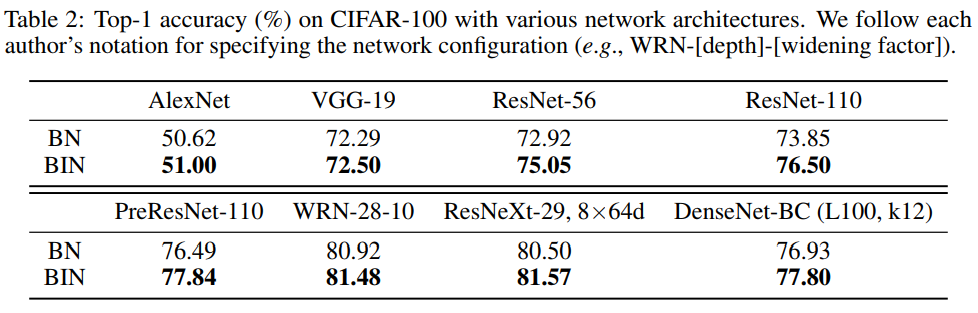
Results
Classification
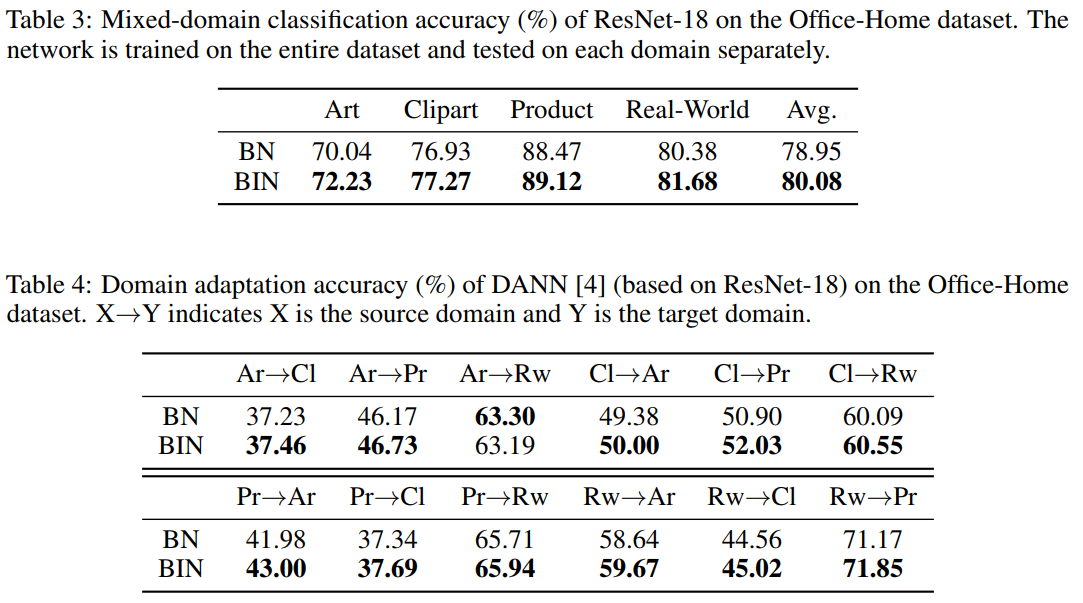
Domain Adaptation
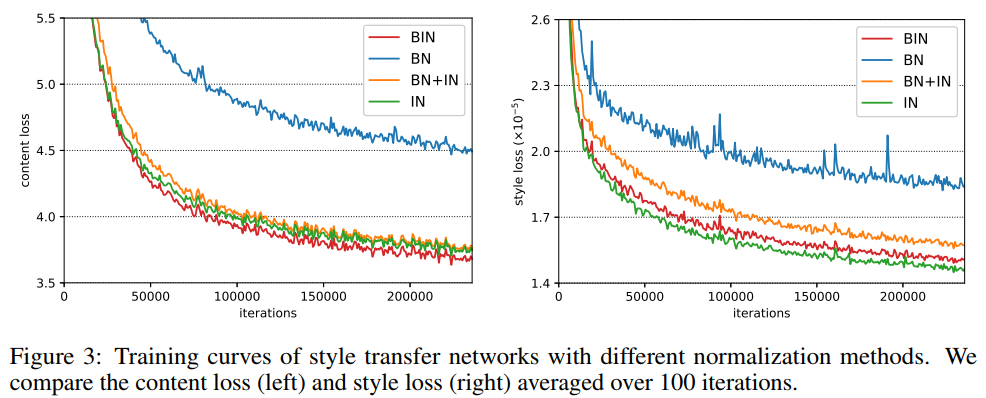
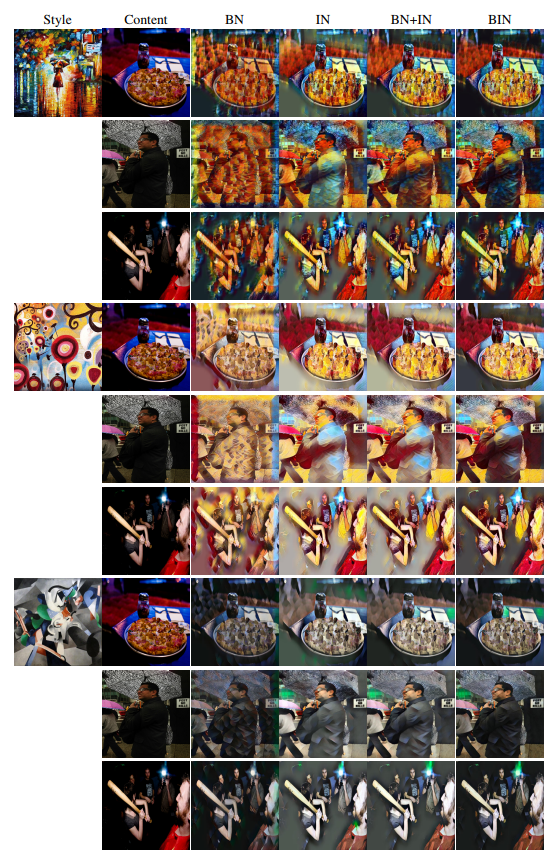
Style Transfer