Text_Segmentation_Image_Inpainting
This is an ongoing project that aims to solve a simple but teddies procedure: remove texts from an image. It will reduce commic book translators' time on erasing Japanese words.
The road ahead:
- Detect and generate text mask from an image
- Use the generated mask to white out words
- Apply image inpainting to reduce color inconsistancy.
Usage
Please see the "Examples" folder
Models
Targeted users generally don't have high spec GPUs or CPUs, so I aim to use/customize fast and memory efficient deep neural nets that can run on CPU only environment.
Text Segmentation
The model contains three parts: encoder, feature pooling, and decoder.
Encoder
The backbone is Mobile Net V2, and I append a Spatial and Channel Squeeze & Excitation Layer. The original model has width multiplier of 1, and I change it to 2. The number of parameters in the convolution part doubles, but the run time increases from 3 seconds to 7 seconds. In addition, I replace the outstride 16 and 32 blocks to dilatation to enlarge field of view (DeepLab V3, DeepLab V3+) .
- There are some minor differences from the current implementation. I will update the model illustrations later.

Feature Pooling
The model is Receptive Field Block (RFB). It is similar to DeepLab v3+'s Atrous Spatial Pyramid (ASP) pooling, but RFB use separable convolution (Effnet-like without pooling) with larger kernel size (I choose 3,5,7) followed by atrous convolution.

Decoder
Deocder follows Deeplab V3+: features are up scaled x2 and concatenated with 1/4 encoder features, and then they are up-scaled back to the same size of input image.
Notes on Segmentation
Standard Mobile Net V2 with width multiplier 1 (1.8M parameters) seems too week for this project. Setting it to 1.4 (3.5M parameters) doesn't improve the result significantly, though I have not train it long enough. I then set the width to 2 (7.0M parameters) and add spatial & channel extra squeeze and excitation (0.17M parameters) after all inverse residual block. It has satisfying result on multi-label classification during pre-training. It also show significant improvement on segmentation.
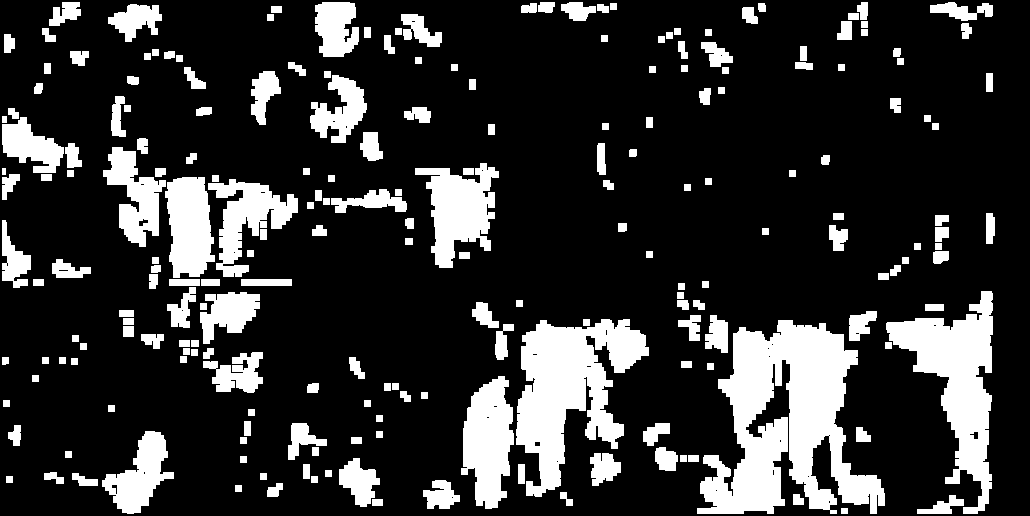
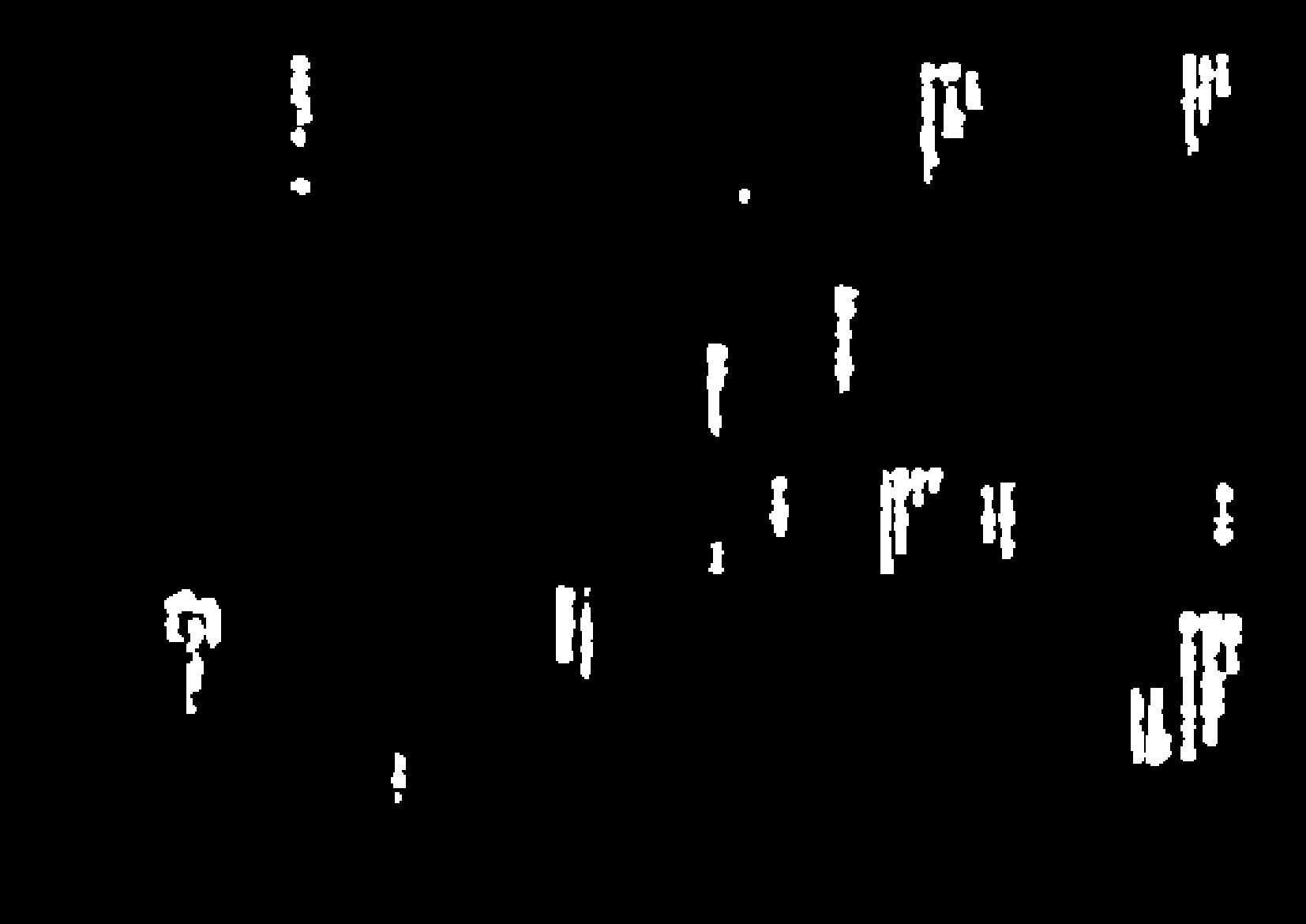
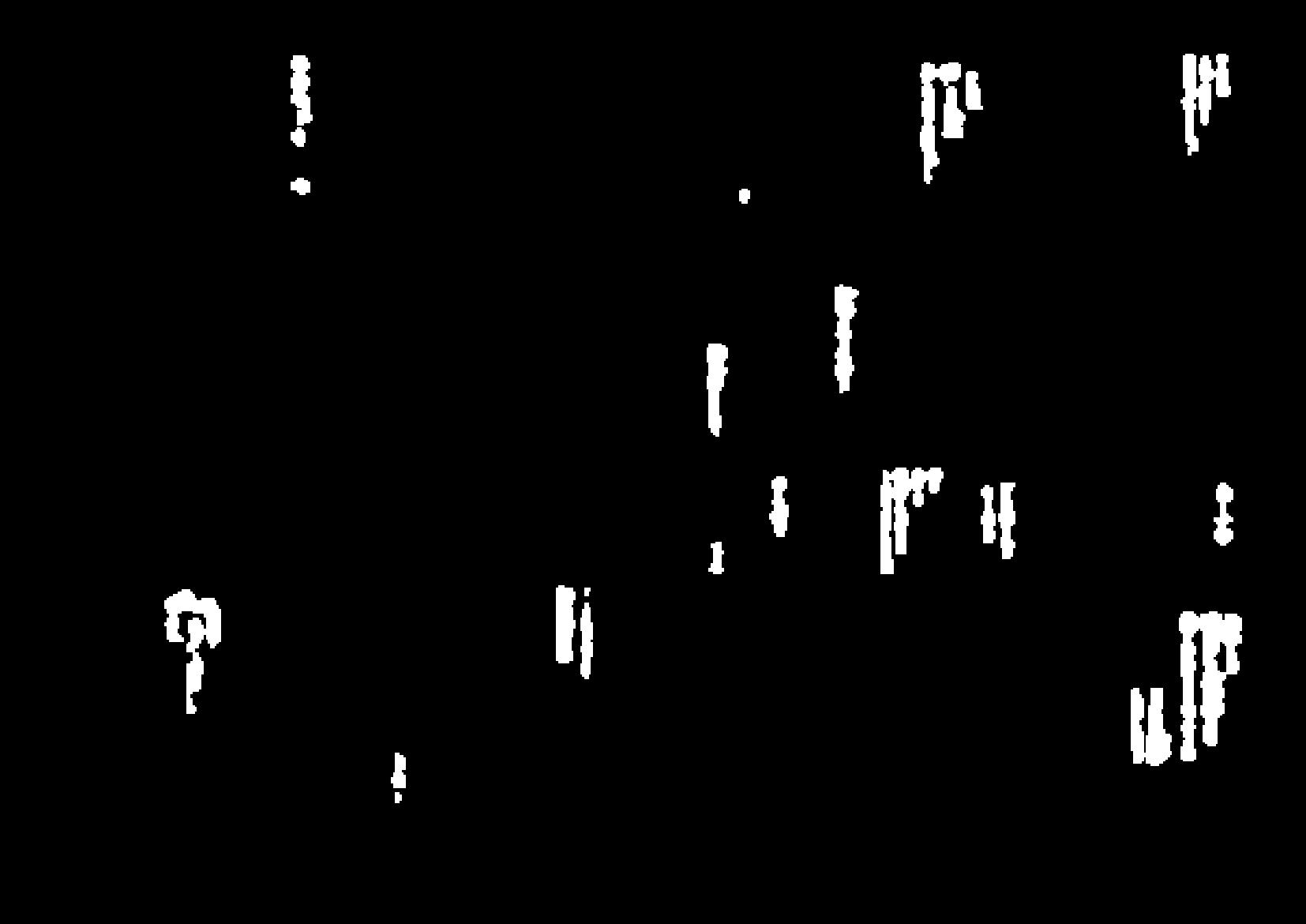
Another point is the weights on the binary cross entropy. Giving more weights on the text labels will increase false positives. The model can identify more words, but not all words are required to erased, which is why I don't use soft bootstrap cross entropy. However, giving more weights on background, say 5:1, will diverge the model. Assigning 2:1 will give reasonable outcome, but the model miss lots of small size words. For example: In the left image, the word "い" in the left top corner is identified as background. In the right image, the same word is also partially miss-identified. Such problem seems to disappear when I set equal weights.

I don't use a text-detection model such as Textbox Plus Plus, Single Shot MultiBox Detector, or Faster R-CNN because I don't have images that have bounding boxes on text regions. Real world image databases don't fit this project's goal.
To generate training data, I use two copies of images: one is the origin image, and the other one is text clean. These images are abundant and easy to obtain from either targeted users or web-scraping. By subtracting the two, I get a mask that shows text only. Training masks general have noise where words are not sharp enough. By experiment, on a 512x512 image, max pool with kernel size 3-7 are good enough.
The idea is inspired by He, etc's Single Shot Text Detector with Regional Attention and He,etc's Mask-R-CNN. Both papers show a pixel level object detection.
Examples
The model is trained on black/white images, but it also works for color images. The following images have not been trained.
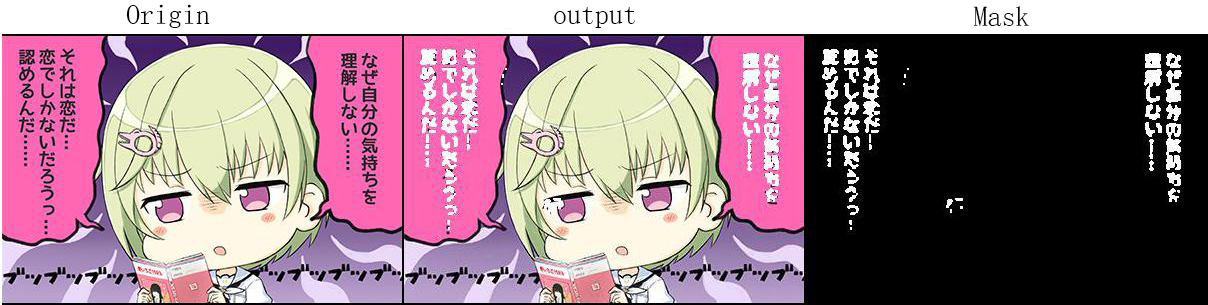
Source:
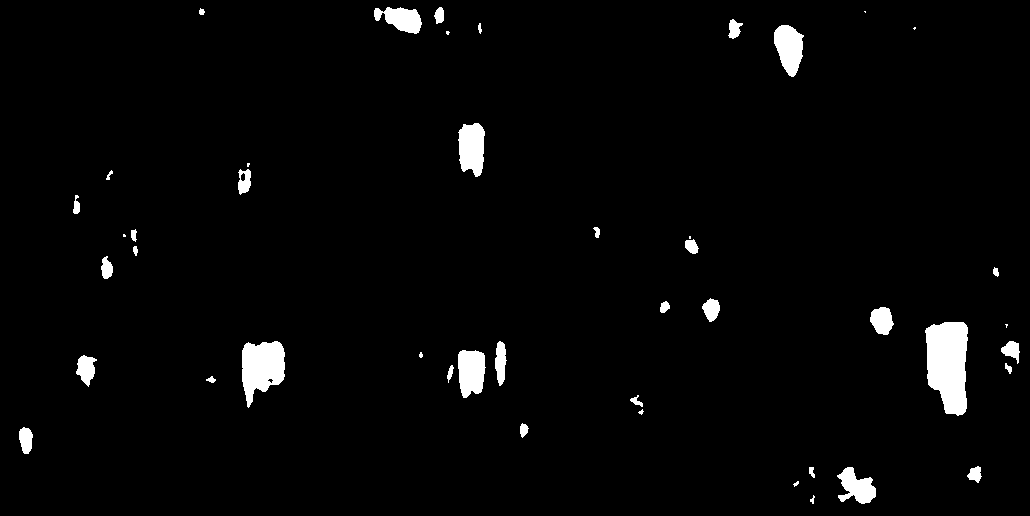
Contour around texts

Generated mask
Source:
河方 かおる, "GOOD_KISS_Ver2", page 59, "Manga 109", Japanese Manga Dataset
Y.Matsui, K.Ito, Y.Aramaki, A.Fujimoto, T.Ogawa, T.Yamasaki, K.Aizawa, Sketch-based Manga Retrieval using Manga109 Dataset, Multimedia Tools and Applications, Springer, 2017
T.Ogawa, A.Otsubo, R.Narita, Y.Matsui, T.Yamasaki, K.Aizawa、Object Detection for Comics using Manga109 Annotations, arXiv:1803.08670
More examples will be added after I obtain authors' consent.
Image Inpainting
The model structure is U-Net like, but all convolutions are replaced by the partial convolution from Liu, etc's paper Image Inpainting for Irregular Holes Using Partial Convolutions, which is similar to a weighted convolution with respect to image holes.
My implementation is influenced by Seitaro Shinagawa's codes. However, due to heavy indexing in partial convolution, it becomes the bottleneck. For example, I use depth-wise separable convolutions instead of standard convolutions, but I find it consumes a lot more memory and runs 2x slower. The culprit is in ```torch.where``:
update_holes = output_mask > 0
mask_sum = torch.where(update_holes, output_mask, torch.ones_like(output))
output_pre = (output - output_bias) / mask_sum + output_bias
output = torch.where(update_holes, output_pre, torch.zeros_like(output))
But if I use masked_fill_, both runtime and memory usage reduce significantly.
In addition, I use double convolution with residual connect in each layer. Increasing model depth significantly improve results. I train two models on 20 images with random masks. One is the model from the paper, and it has over 32 million parameters. The other model has 2x depth, but the layers that have 512 channels are replaced by 256, resulting in over 18 millions parameters. More specifically, layers in the second model has the following structure:
partial convolution ( stride 2) --> batch norm --> activation --> partial convolution (stride 1) --> batch norm --> activation --> residual add from previous convolution
Both models are trained 2000k iterations, and the deeper model give better visualization.
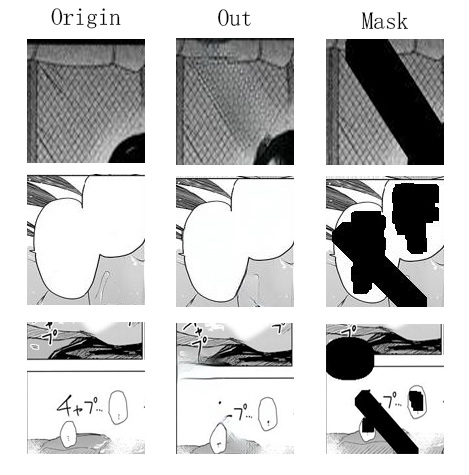
I also find something very interesting during training. In the early stages, the model can generate or find some parts of a image to fill in holes. For example, images below have holes replacing text inside polygons. In the left and the middle image, the model find some parts of the image to fill the holes; in the right image, the model generates a manga-like frame inside the hole.



As a comparison, I also train a model with depth-wise separable partial convolutions but fail to find similar results.
Instead, that model will generate some blurring patches on the hole like this one:

Examples
The model has not converged yet after 10 hours of training on 3560 images with Nvidia V-100. More examples will be added.
Notes on gated convolution:
I implement the gated convolution from Yu, etc's paper Free-Form Image Inpainting with Gated Convolution. The main idea is to update the mask by a sigmoid rather than harding setting it to 1 or 0. I am not able to train the model with GAN in short time since I am renting GPUs. But if I replace the loss function with the one from the partial convolution, the model converges.
However, I am concerned with the model performance. Gated convolution has a lot more parameters from the convolutions on masks. The partial convolution has no learnable parameters on masks. I am wondering the model is easier over-fitting the training data.
In addition, I am not able to comprehend the implantation. According the author's comment, the gated convolution looks like this:
x1 = self.conv1(x)
x2 = self.conv2(x)
x = sigmoid(x2) * activation(x1)
# or more GPU efficient way:
x = self.conv(x)
x1, x2 = split(x, 2) # split along channels
x = sigmoid(x2) * activation(x1)
The mask and input image are concatenated and sent into the model. One problem is that if a mask has one channel and a image has three, then as convolutions go deeper, the mask has far less weigh than the image. Splitting a feature map equally may give incorrect weights. On the other hand, even if the mask has same channel as the input image, standard convolutions will connect both of them during training. Information will travel through all channels, so splitting feature maps by half may break the information flow. Using depth-wise separable convolution may solve this issue, but the problem remains: why half of them are from mask.
I am searching an alternative based on this one. The main idea comes from LSTM's attention mechanism. I use separated convolutions on input image and binary mask. The binary mask has 1 for valid pixel and 0 for hole. By reversing the label, its convolution outputs have 0 on all valid pixels while some weights on holes positions. Applying tanh and multiply to the input feature map will look like attention on images' holes. It is similar to partial convolution which gives more weights on holes. But I have not find an efficient way to update the mask. Comments and suggestions are welcome.
Current Stage
Text segmentation
I train several versions of Mobile Net V2 with various settings and pre-trained check points, but none of them works perfect even on my training images. The problem might be the Mobile Net V2's size. ResNet 50 & 101, which have more than 10x numbers of parameters, have much better performance records.
Another problem is that models are pre-trained on photos from the real word, but my training images are completely different. For example, ImageNet's mean and std (RGB) are [0.485, 0.456, 0.406] and [0.229, 0.224, 0.225], but images from Danbooru2017, which come close to my training samples, have mean [ 0.4935, 0.4563, 0.4544] and std [0.3769, 0.3615, 0.3566]. Transfer learning might not work well (Torralba & Efros, 2011).
July 10th
I implement a naive one-vs-all binary CNN model that treats each label as independent. The error rate is unsurprisingly terrible. I then implement a CNN-LSTM model which recurrently finds attention regions and detects labels. Such approach is bounding-box free and similar to one-stage detection such as SSD.
Given the official code has not been released yet, I take my freedom to tweak and change model details: the paper uses fully connected layers in between feature maps and LSTM, and its lost function contains 4 anchor distance loss.
I use global average pooling to send concatenated feature maps into LSTM and let it learn the residual parts of anchor position, which means LSTM predicts the distance away from the anchor points. That makes the LSTM part looks around the image. In addition, in the loss function, I add bounding constrain on the spatial transform matrix (its horizontal absolute sum <=1 ) so that attention regions will be inside the image and not be zero padded. That makes my global pooling effective.
July 13th
Training on Danbooru2017 is completed. I select the top 500 labels from descriptive tags and 113K images that have the most tags. Each training sample has at least 20 tags, and the top 1,000 images have more than 100 tags. The model is trained on Nvidia-V100 for over 20 hours with cyclical learning rate. One epoch takes around 1.5 hours. Since the goal is transfer learning, I stop training before the model converges.
July 14th
Training on text segmentation is completed. Training takes 2 stages: I freeze the encoder in the first stage and monitor the performance on the validation set. Before the model over-fits the training samples, I then re-train all parameters.
I have only 2k training images, but the model performance seems acceptable. I need to collect more data since the model is over-fitting the samples.
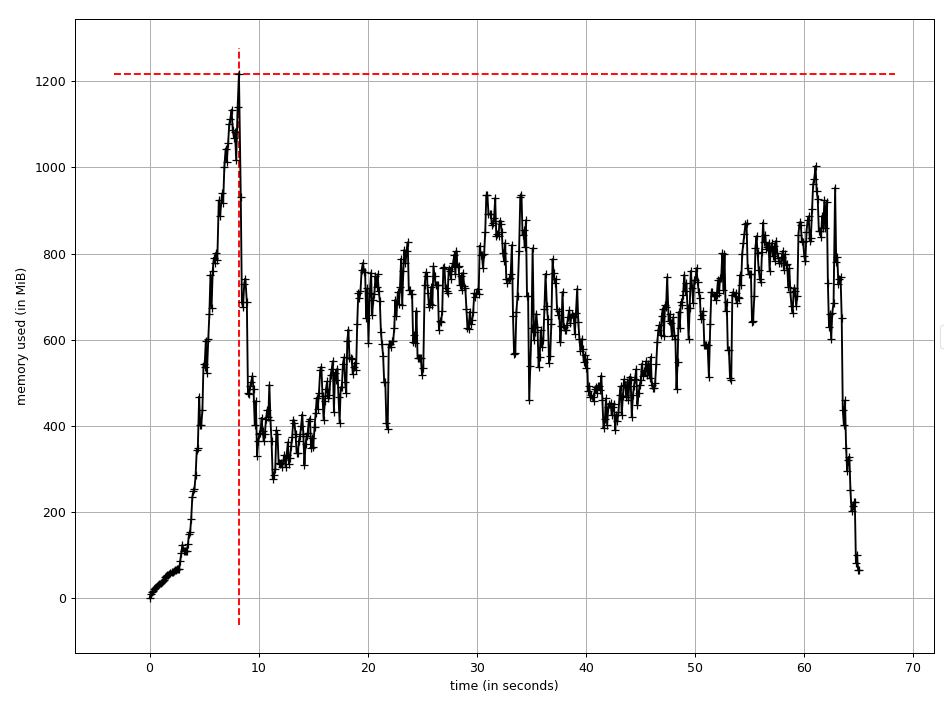
Memory usage: 4 CPUs and 8 images.
July 24th
Training the partial convolution.
Aug 18th
Training Xecption based text segmentation. I pre-train a slim version of Xecption on 113k images from Danbooru2017. It is then incorporated into the segmentation model. There are significant changes compared to the model in deeplab V3 +.
-
Convolutions are always followed by batch norm. Standard depth-wise separable convolution fails to converge during pre-training. Adding batch norm in between depth-wise and point-wise convolution helps significantly.
-
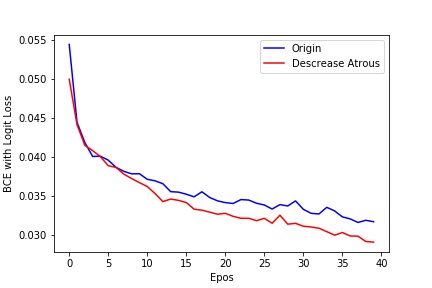
Atrous rates are 2--4--2--1 in the middle and exit flow. The structure comes from a Effective Use of Dilated Convolutions for Segmenting Small Object Instances in Remote Sensing Imagery by Hamaguchi & Fujita & Nemoto & Imaizumi & Hikosaka. I run an experiment comparing it to the original model and find promising results.

Notes on Hyper-parameters
- Cyclical learning rate is a great tool but needs to pick optimal base & max learning rate. Learning rate range can be as large as 0.1-1 with few epochs (Exploring loss function topology with cyclical learning rates).
- Weighted binary cross entropy loss may be better than focal loss.
With cyclical learning rate from 1e-4 ~ 1e-2, and 100 iterations on 200 images.
| AP score (validation images) | |
|---|---|
| Gamma 0, Background:1, words:2 | 0.2644 |
| Gamma .5, Background:1, words:2 | 0.2411 |
| Gamma 1, Background:1, words:2 | 0.2376 |
| Gamma 2, Background:1, words:2 | 0.2323 |
| Gamma 0, Background:1, words:1 | 0.2465 |
| Gamma 1, Background:1, words:1 | 0.2466 |
| Gamma 2, Background:1, words:1 | 0.2431 |
| Gamma 0, Background:1, words:5 | 0.2437 |
- Weight decay should be smaller than 1e-3. 1e-4 is better than 1e-5 when use cyclical learning rate and SGD (with nesterov).
Difference on Up-sampling
-
bilinear up-sample
-
transpose convolution
-
pixel shuffling