AFSM
Tackle the problem of significant scale variation in object detection using adaptve feature selection module (AFSM).
This repository is the official implementation of Towards Better Object Detection in Scale Variation with Adaptive Feature Selection , which is based on PaddleDetection.
Requirements
- Linux (Windows is not officially supported)
- Python 3.6 or higher
- PaddlePaddle 1.8.0 or higher
- CUDA 9.0+
- cuDNN 7.6+
- GCC 4.9+
- mmcv
Installation
a. Create a conda virtual environment and activate it.
conda create -n afsm_detection python=3.6 -y
source activate afsm_detection
b. Install PaddlePaddle following the official instructions.
e.g.
python -m pip install paddlepaddle-gpu==1.8.5.post97 -i https://mirror.baidu.com/pypi/simple
c. Clone our code
git clone https://github.com/ZeHuiGong/AFSM.git
cd AFSM_Detection
d. install requirements and compile
pip install mmcv==0.2.8
pip install pycocotools
pip install -r requirements.txt
e. Run the following command to test the installation is correct.
python ppdet/modeling/tests/test_architectures.py
f. After the test is passed, the following information will be prompted:
..........
----------------------------------------------------------------------
Ran 12 tests in 2.480s
OK (skipped=2)
Prepare datasets
It is recommended to symlink the dataset root to AFSM_Detection/dataset. Our directory structure is as follows:
AFSM_Detection
├── configs
├── ppdet
├── dataset
│ ├── voc
│ │ ├── test.txt
│ │ ├── trainval.txt
│ │ ├── label_list.txt
│ │ ├── VOCdevkit
│ │ │ ├──VOC2007
│ │ │ ├──VOC2012
│ ├── visdrone
│ │ ├── val2019
│ │ ├── train2019
│ │ ├── test_dev2019
│ │ ├── test_challenge2019
│ │ ├── annotations
- VisDrone (one of the following two methods):
- You can go to the official website to download the dataset and annotations (need to register), and transfer the annotation from
.txtto coco.jsonformat using the following command:
python ppdet/data/tools/visDrone/visdrone2019.py
- Or download our processed version from BaiduAI.
Once downloaded, creat symlinks as the data structure mentioned above. e.g.,
ln -s $Download_Path/annotations AFSM_Detection/dataset/visdrone/
ln -s $Download_Path/VisDrone2019-DET-train/images AFSM_Detection/dataset/visdrone/train2019
ln -s $Download_Path/VisDrone2019-DET-val/images AFSM_Detection/dataset/visdrone/val2019
ln -s $Download_Path/VisDrone2019-DET-test-dev/images AFSM_Detection/dataset/visdrone/test_dev2019
ln -s $Download_Path/VisDrone2019-DET-test-challenge/images AFSM_Detection/dataset/visdrone/test_challenge2019
where $Download_Path implies the path you download on the disk.
- PASCAL-VOC
Run the following command to download the VOC dataset.
python dataset/voc/download_voc.py
Once done, the data stucture will be the same as mentioned above.
Using symlinks is a good idea because you will likely want to share the same dataset installation between multiple projects.
Train a model
- VOC
To train a model on the union set of VOC 2007 and 2012 train&val, we provide demo congif files in AFSM_Detection/configs/anchor_free/centernet/voc_exps/, simply run
python tools/train.py \
-c configs/anchor_free/centernet/voc_exps/r101_vd_fpn_dcn_AFSM_GcbMixupCasmGIOU.yml \
-o use_gpu=true
- VisDrone
For the VisDrone-DET 2019 dataset, the demo config files to reproduce the main results in the paper is given in AFSM_Detection/configs/anchor_free/centernet/visdrone_exps/.
e.g., simply run:
python tools/train.py \
-c configs/anchor_free/centernet/visdrone_exps/cbr50_fpn_dcn_AFSM_GcbMixupCasmGIOU.yml \
-o use_gpu=true
Feel free to change the config file, if you want to train on other settings, e.g., various backbone network. Besides, batch_size can be set adaptively according to your GPU memory, in the corresponding config file.
Evaluation
Once you have trained the network, run the following command to evaluate the performance of the trained model. For example, you want to evaluate the performance trained with Resnet101 backbone, on the VOC dataset, simply run:
CUDA_VISIBLE_DEVICES=0
python tools/eval.py \
-c configs/anchor_free/centernet/voc_exps/r101_vd_fpn_dcn_AFSM_GcbMixupCasmGIOU.yml \
-o use_gpu=true \
weights=output/r101_vd_fpn_dcn_AFSM_GcbMixupCasmGIOU/model_final \
--test_scales 1.0
For testing on the VisDrone-DET validation dataset, simply run:
python tools/eval.py \
-c configs/anchor_free/centernet/visdrone_exps/cbr50_fpn_dcn_AFSM_GcbMixupCasmGIOU.yml \
-o use_gpu=true \
weights=output/cbr50_fpn_dcn_AFSM_GcbMixupCasmGIOU/model_final \
--test_scales 1.0
Feel free to change the trained wieght with different checkpoint, by setting the weights parameter.
Results
Thanks to the novel designs proposed in our paper, i.e., adaptive feture selection module (AFSM) and class-aware sampling mechanism (CASM), we uplift the strong baseline
to a new state-of-the-art performance, with tiny inference overhead.
- VisDrone
The comparison results with other state-of-the-art methods on the VisDrone-DET validation subset are showed as follows:
| Method | Backbone | AP | AP50 | AP75 |
|---|---|---|---|---|
| Cascade R-CNN | ResNet50 | 24.10 | 42.90 | 23.60 |
| Faster R-CNN | ResNet50 | 23.50 | 43.70 | 22.20 |
| RetinaNet | ResNet50 | 15.10 | 27.70 | 14.30 |
| FCOS | ResNet50 | 16.60 | 28.80 | 16.70 |
| HFEA | ResNeXt101 | 27.10 | - | - |
| HFEA | ResNeXt152 | 30.30 | - | - |
| ClusDet | ResNeXt101 | 32.40 | 56.20 | 31.60 |
| CPEN+FPEN | Hourglass104 | 36.70 | 53.20 | 39.50 |
| DMNet+DSHNet | ResNet50 | 30.30 | 51.80 | 30.90 |
| DSOD | ResNet50 | 28.80 | 47.10 | 29.30 |
| HRDNet | ResNet18+101 | 28.33 | 49.25 | 28.16 |
| HRDNet+ | ResNeXt50+101 | 35.51 | 62.00 | 35.13 |
| Ours | CBResNet50 | 33.95 | 60.46 | 32.69 |
| Ours+ | CBResNet50 | 37.62 | 65.41 | 37.06 |
| Ours | CBResNet50+DCN | 35.43 | 61.88 | 34.60 |
| Ours+ | CBResNet50+DCN | 39.48 | 66.98 | 39.45 |
- means multi-scale testing augmentation is employed
- VOC
we report the results on VOC 2007 test set, in terms of mAP (%).
| Method | Backbone | Input size | mAP | FPS |
|---|---|---|---|---|
| Faster R-CNN | ResNet101 | 1000x600 | 76.4 | 5 |
| R-FCN | ResNet101 | 1000x600 | 80.5 | 9 |
| OHEM | VGG-16 | 1000x600 | 74.6 | - |
| R-FCN | ResNet101+DCN | 1000x600 | 82.6 | - |
| CoupleNet | ResNet101 | 1000x600 | 82.7 | 8.2 |
| DeNet(wide) | ResNet101 | 512x512 | 77.1 | 33 |
| FPN-Reconfig | ResNet101 | 1000x600 | 82.4 | - |
| Yolov2 | DarkNet19 | 544x544 | 78.6 | 40 |
| SSD | VGG-16 | 513x513 | 78.9 | 19 |
| DSSD | VGG-16 | 513x513 | 81.5 | 5.5 |
| RefineDet | VGG-16 | 512x512 | 81.8 | 24 |
| CenterNet | ResNet101 | 512x512 | 78.7 | 30 |
| CenterNet | DLA | 512x512 | 80.7 | 33 |
| HRDNet | ResNeXt50+101 | 2000x1200 | 82.4 | - |
| Ours | CBResNet50 | 511x511 | 78.2 | 25.08 |
| Ours | CBResNet50+DCN | 511x511 | 81.05 | 21.98 |
| Ours | ResNet101+DCN | 511x511 | 83.04 | 15.96 |
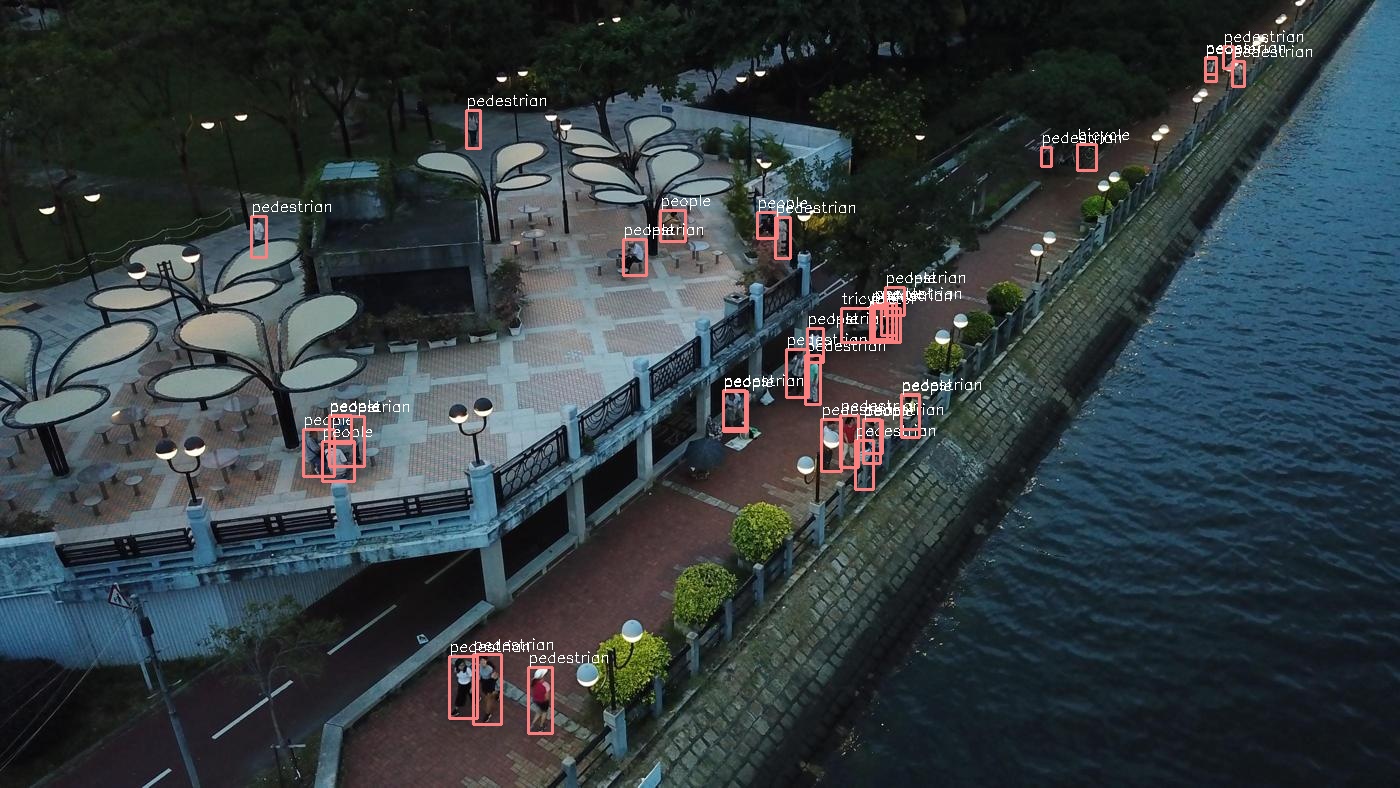
Visualization
Some detection results on the Visdrone-DET validation subset are showed as follows:

Demo
In addition, one can also infererence the pre-trained model, by given other demo images. Suppose the images are given in demo/.
e.g.,
python tools/infer.py \
-c configs/anchor_free/centernet/voc_exps/r101_vd_fpn_dcn_AFSM_GcbMixupCasmGIOU.yml \
--infer_img=demo/voc000054.jpg
The inference result will be stored at $AFSM_Detection/output.
Citation
If you benefit from our work in your research and product, please consider to cite the following related papers:
@ARTICLE{2020arXiv201203265G,
author = {{Gong}, Zehui and {Li}, Dong},
title = "{Towards Better Object Detection in Scale Variation with Adaptive Feature Selection}",
journal = {arXiv e-prints},
keywords = {Computer Science - Computer Vision and Pattern Recognition},
year = 2020,
month = dec,
eid = {arXiv:2012.03265},
pages = {arXiv:2012.03265},
archivePrefix = {arXiv},
eprint = {2012.03265},
primaryClass = {cs.CV},
adsurl = {https://ui.adsabs.harvard.edu/abs/2020arXiv201203265G},
adsnote = {Provided by the SAO/NASA Astrophysics Data System}
}



