baller2vec
This is the repository for the paper:
Michael A. Alcorn and Anh Nguyen. baller2vec: A Multi-Entity Transformer For Multi-Agent Spatiotemporal Modeling. arXiv. 2021.
 |
|---|
The input for baller2vec at each time step t is an unordered set of feature vectors containing information about the identities and locations of NBA players on the court, along with the ball. The model uses these inputs to classify either the binned trajectory for each player (left) or the ball (right). |
 |
|---|
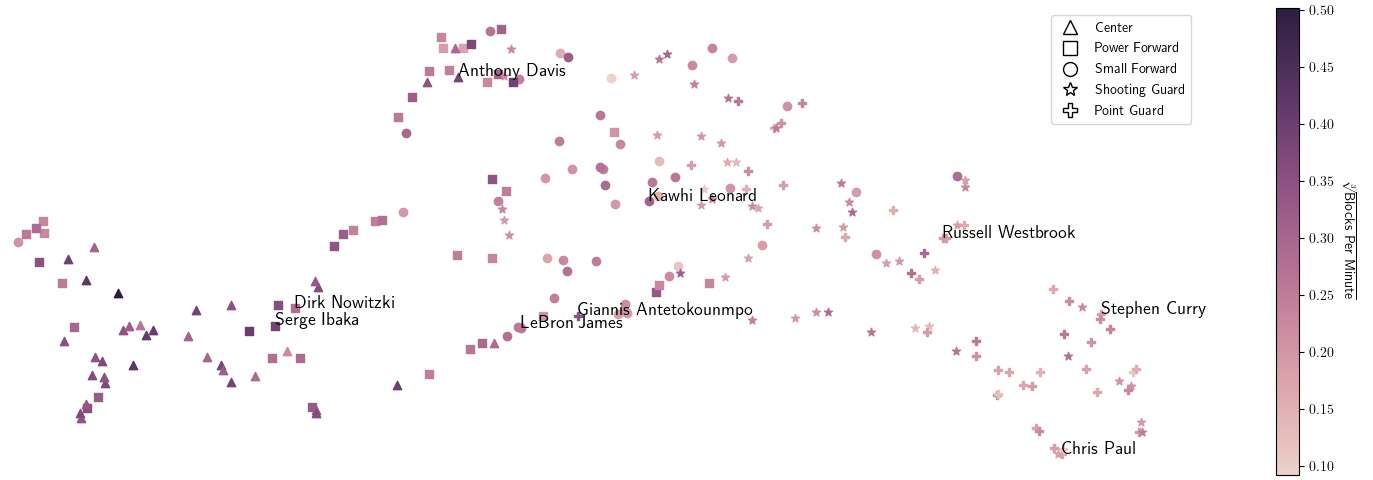
By exclusively learning to predict the trajectory of the ball, baller2vec was able to infer idiosyncratic player attributes. |
 |
|---|
Further, nearest neighbors in baller2vec's embedding space are plausible doppelgängers. Credit for the images: Erik Drost, Keith Allison, Jose Garcia, Keith Allison, Verse Photography, and Joe Glorioso. |
 |
|---|
Additionally, several attention heads in baller2vec appear to perform different basketball-relevant functions, such as anticipating passes. Code to generate the GIF was adapted from @linouk23's NBA Player Movement's repository. |
 |
|---|
Here, a baller2vec model trained to simultaneously predict the trajectories of all the players on the court uses both the historical and current context to forecast the target player's trajectory at each time step. The left grid shows the target player's true trajectory at each time step while the right grid shows baller2vec's forecast distribution. The blue-bordered center cell is the "stationary" trajectory. |
Citation
If you use this code for your own research, please cite:
@article{alcorn2021baller2vec,
title={\texttt{baller2vec}: A Multi-Entity Transformer For Multi-Agent Spatiotemporal Modeling},
author={Alcorn, Michael A. and Nguyen, Anh},
journal={arXiv preprint arXiv:2102.03291},
year={2021}
}
Training baller2vec
Setting up .basketball_profile
After you've cloned the repository to your desired location, create a file called .basketball_profile in your home directory:
nano ~/.basketball_profile
and copy and paste in the contents of .basketball_profile, replacing each of the variable values with paths relevant to your environment.
Next, add the following line to the end of your ~/.bashrc:
source ~/.basketball_profile
and either log out and log back in again or run:
source ~/.bashrc
You should now be able to copy and paste all of the commands in the various instructions sections.
For example:
echo ${PROJECT_DIR}
should print the path you set for PROJECT_DIR in .basketball_profile.
Installing the necessary Python packages
cd ${PROJECT_DIR}
pip3 install --upgrade -r requirements.txt
Organizing the play-by-play and tracking data
- Copy
events.zip(which I acquired from here [mirror here] using https://downgit.github.io) to theDATA_DIRdirectory and unzip it:
mkdir -p ${DATA_DIR}
cp ${PROJECT_DIR}/events.zip ${DATA_DIR}
cd ${DATA_DIR}
unzip -q events.zip
rm events.zip
Descriptions for the various EVENTMSGTYPEs can be found here (mirror here).
cd ${DATA_DIR}
git clone [email protected]:linouk23/NBA-Player-Movements.git
A description of the tracking data can be found here.
Generating the training data
cd ${PROJECT_DIR}
nohup python3 generate_game_numpy_arrays.py > data.log &
You can monitor its progress with:
top
or:
ls -U ${GAMES_DIR} | wc -l
There should be 1,262 NumPy arrays (corresponding to 631 X/y pairs) when finished.
Animating a sequence
- If you don't have a display hooked up to your GPU machine, you'll need to first clone the repository to your local machine and retrieve certain files from the remote server:
# From your local machine.
mkdir -p ~/scratch
cd ~/scratch
username=michael
server=gpu3.cse.eng.auburn.edu
data_dir=/home/michael/baller2vec_data
scp ${username}@${server}:${data_dir}/baller2vec_config.pydict .
games_dir=${data_dir}/games
gameid=0021500622
scp ${username}@${server}:${games_dir}/\{${gameid}_X.npy,${gameid}_y.npy\} .
- You can then run this code in the Python interpreter from within the repository (make sure you
source .basketball_profilefirst if running locally):
import os
from animator import Game
from settings import DATA_DIR, GAMES_DIR
gameid = "0021500622"
try:
game = Game(DATA_DIR, GAMES_DIR, gameid)
except FileNotFoundError:
home_dir = os.path.expanduser("~")
DATA_DIR = f"{home_dir}/scratch"
GAMES_DIR = f"{home_dir}/scratch"
game = Game(DATA_DIR, GAMES_DIR, gameid)
# https://youtu.be/FRrh_WkyXko?t=109
start_period = 3
start_time = "1:55"
stop_period = 3
stop_time = "1:51"
game.show_seq(start_period, start_time, stop_period, stop_time)
to generate the following animation:
Running the training script
Run (or copy and paste) the following script, editing the variables as appropriate.
#!/usr/bin/env bash
# Experiment identifier. Output will be saved to ${EXPERIMENTS_DIR}/${JOB}.
JOB=$(date +%Y%m%d%H%M%S)
# Training options.
echo "train:" >> ${JOB}.yaml
task=ball_traj # "ball_traj" or "player_traj".
echo " task: ${task}" >> ${JOB}.yaml
echo " min_playing_time: 0" >> ${JOB}.yaml # 0/13314/39917/1.0e+6 --> 100%/75%/50%/0%.
echo " train_valid_prop: 0.95" >> ${JOB}.yaml
echo " train_prop: 0.95" >> ${JOB}.yaml
echo " train_samples_per_epoch: 20000" >> ${JOB}.yaml
echo " valid_samples: 1000" >> ${JOB}.yaml
echo " workers: 10" >> ${JOB}.yaml
echo " learning_rate: 1.0e-5" >> ${JOB}.yaml
echo " patience: 20" >> ${JOB}.yaml
if [[ ("$task" = "event") || ("$task" = "score") ]]
then
echo " prev_model: False" >> ${JOB}.yaml
fi
# Dataset options.
echo "dataset:" >> ${JOB}.yaml
echo " hz: 5" >> ${JOB}.yaml
echo " secs: 4.2" >> ${JOB}.yaml
echo " player_traj_n: 11" >> ${JOB}.yaml
echo " max_player_move: 4.5" >> ${JOB}.yaml
echo " ball_traj_n: 19" >> ${JOB}.yaml
echo " max_ball_move: 8.5" >> ${JOB}.yaml
echo " n_players: 10" >> ${JOB}.yaml
echo " next_score_change_time_max: 35" >> ${JOB}.yaml
echo " n_time_to_next_score_change: 36" >> ${JOB}.yaml
echo " n_ball_loc_x: 95" >> ${JOB}.yaml
echo " n_ball_loc_y: 51" >> ${JOB}.yaml
echo " ball_future_secs: 2" >> ${JOB}.yaml
# Model options.
echo "model:" >> ${JOB}.yaml
echo " embedding_dim: 20" >> ${JOB}.yaml
echo " sigmoid: none" >> ${JOB}.yaml
echo " mlp_layers: [128, 256, 512]" >> ${JOB}.yaml
echo " nhead: 8" >> ${JOB}.yaml
echo " dim_feedforward: 2048" >> ${JOB}.yaml
echo " num_layers: 6" >> ${JOB}.yaml
echo " dropout: 0.0" >> ${JOB}.yaml
if [[ "$task" != "seq2seq" ]]
then
echo " use_cls: False" >> ${JOB}.yaml
echo " embed_before_mlp: True" >> ${JOB}.yaml
fi
# Save experiment settings.
mkdir -p ${EXPERIMENTS_DIR}/${JOB}
mv ${JOB}.yaml ${EXPERIMENTS_DIR}/${JOB}/
# Start training the model.
gpu=0
cd ${PROJECT_DIR}
nohup python3 train_baller2vec.py ${JOB} ${gpu} > ${EXPERIMENTS_DIR}/${JOB}/train.log &





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}