3D Multi-Object Tracker
This project is developed for tracking multiple objects in 3D scene. The visualization code is from here.
Features
- Fast: currently, the codes can achieve 700 FPS using only CPU (not include detection and data op), can perform tracking on all kitti val sequence in several seconds.
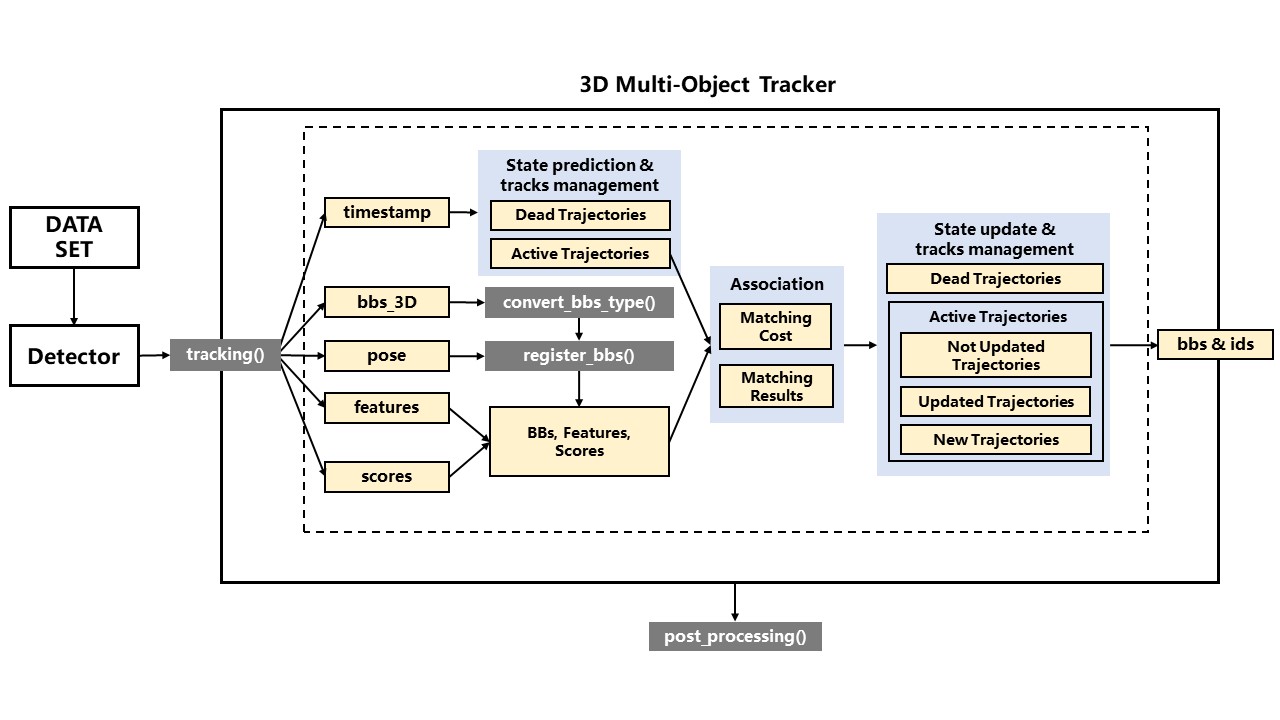
- Support both online and global implementation. The overall framework of design is shown below:
Kitti Results
Results on the Kitti tracking val seq [1,6,8,10,12,13,14,15,16,18,19] using second-iou and point-rcnn detections. We followed the HOTA metric, and tuned the parameters in this code by firstly considering the HOTA performance.
| Detector | HOTA | DetA | AssA | DetRe | DetPr | AssRe | AssPr | LocA | MOTA |
|---|---|---|---|---|---|---|---|---|---|
| second-iou | 78.787 | 74.482 | 83.611 | 80.665 | 84.72 | 89.022 | 88.575 | 88.63 | 85.129 |
| point-rcnn | 78.91 | 75.814 | 82.406 | 83.489 | 82.185 | 87.209 | 87.586 | 87.308 | 88.412 |
Prepare data
You can download the Kitti tracking pose data from here, and you can find the point-rcnn and second-iou detections from here.
To run this code, you should organize Kitti tracking dataset as below:
# Kitti Tracking Dataset
└── kitti_tracking
├── testing
| ├──calib
| | ├──0000.txt
| | ├──....txt
| | └──0028.txt
| ├──image_02
| | ├──0000
| | ├──....
| | └──0028
| ├──pose
| | ├──0000
| | | └──pose.txt
| | ├──....
| | └──0028
| | └──pose.txt
| ├──label_02
| | ├──0000.txt
| | ├──....txt
| | └──0028.txt
| └──velodyne
| ├──0000
| ├──....
| └──0028
└── training # the structure is same as testing set
├──calib
├──image_02
├──pose
├──label_02
└──velodyne
Detections
└── point-rcnn
├── training
| ├──0000
| | ├──000001.txt
| | ├──....txt
| | └──000153.txt
| ├──...
| └──0020
└──testing
Requirements
python3
numpy
opencv
yaml
Quick start
- Please modify the dataset path and detections path in the yaml file to your own path.
- Then run
python3 kitti_3DMOT.py config/point_rcnn_mot.yaml - The results are automatically saved to
evaluation\results\sha_key\data, and evaluated by HOTA metrics.









