hope-autonomous-driving
Autonomous Driving project for Euro Truck Simulator 2
Video:
How is it working ?
In this video, the program processes the image of the screen, gives it to the artificial intelligence model, turns the steering wheel according to the result.
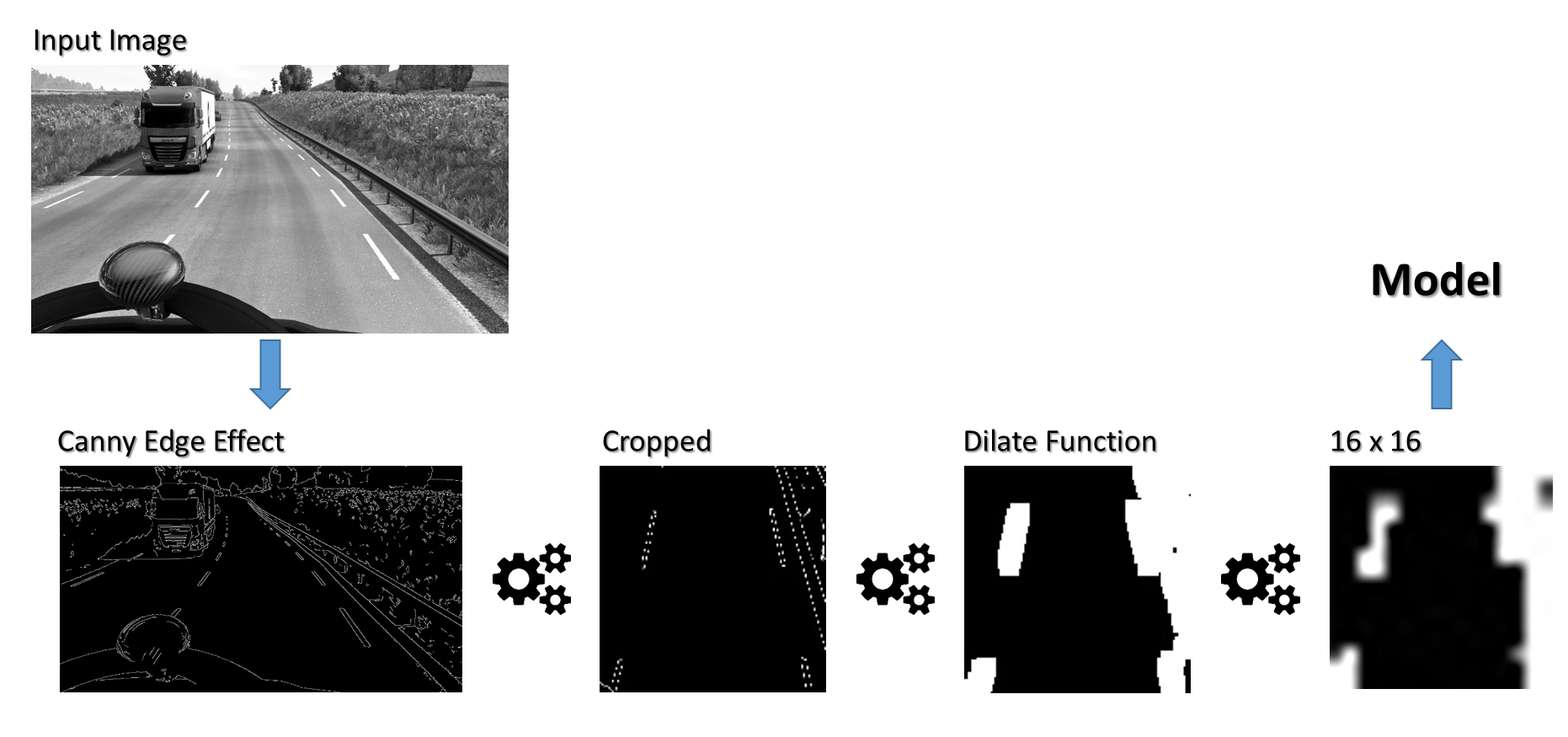
I drove the vehicle for 1 hour and also collected data and saved them in a CSV file. I trained the data in the CSV file using the method and model in this link.
The model gives us a pixel value equal to the steering angle of the steering wheel. Then the mouse is moved to this pixel value.
I want to run this
There are things you need to do before running codes:
- You need to install Python (I used version 3.7.9),
- You have to install the components I use. If this is your first time using Python type in cmd:
python -m pip install -r requirements.txt
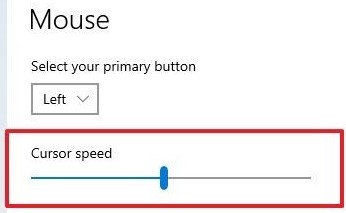
- Change the Windows cursor speed to 4
- Set the game to full screen and at 1280x720 resolution,
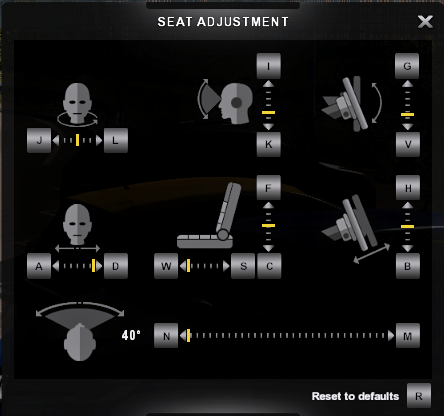
- Adjust your seat to be the same as in the picture,
- Type in console (enable console):
c_rsteersens 0.325500

Move game window top-left corner (or full screen) and make the steering wheel centered. Press F1 and stop game, run the code and turn back to game. Code will take over steering control. You must not move your mouse before code start.
(Press F1 to stop the code) (Hold "Z" to pass to left lane, hold "X" to pass to right lane)
Older Versions
They were driving the car using only the A and D keys. It was working with bunch of if-else' instead deep learning.
Limitations
Not compatible with 1.40. Because high beams don't affect shadows.
Shadows can confuse the model (for example this clip). To avoid this you can use high beams.
The supervised learning model is powerful as dataset. If you use 5 or 10 hours of driving footage instead of 1 hour, the model performance will increase amazingly. If I do it before you do, I'll upload the model here ;)
What's Next
- :white_check_mark: Lane changing
- :gear: Adaptive cruise control
- Emergency brake
- Export as exe file






