Neural Reprojection Error
Neural Reprojection Error: Merging Feature Learning and Camera Pose Estimation (CVPR 2021)
This is the official repository for our paper, which contains model weights and source code to perform NRE-based absolute camera pose estimation.
Dependencies
This repository was tested with the following packages, other versions should be compatible:
- Python 3.8.5
- PyTorch 1.8.1
- PyTorch Lightning 1.2.10
- OpenCV 4.5.1
- Plotly 4.10.0
- NumPy 1.19.2
- coloredlogs 15.0
They can all be installed following command:
pip3 install numpy opencv-python torch torchvision pytorch-lightning plotly coloredlogs
Running
For a given pair of images, localizing with the NRE-based pose estimator is as simple as:
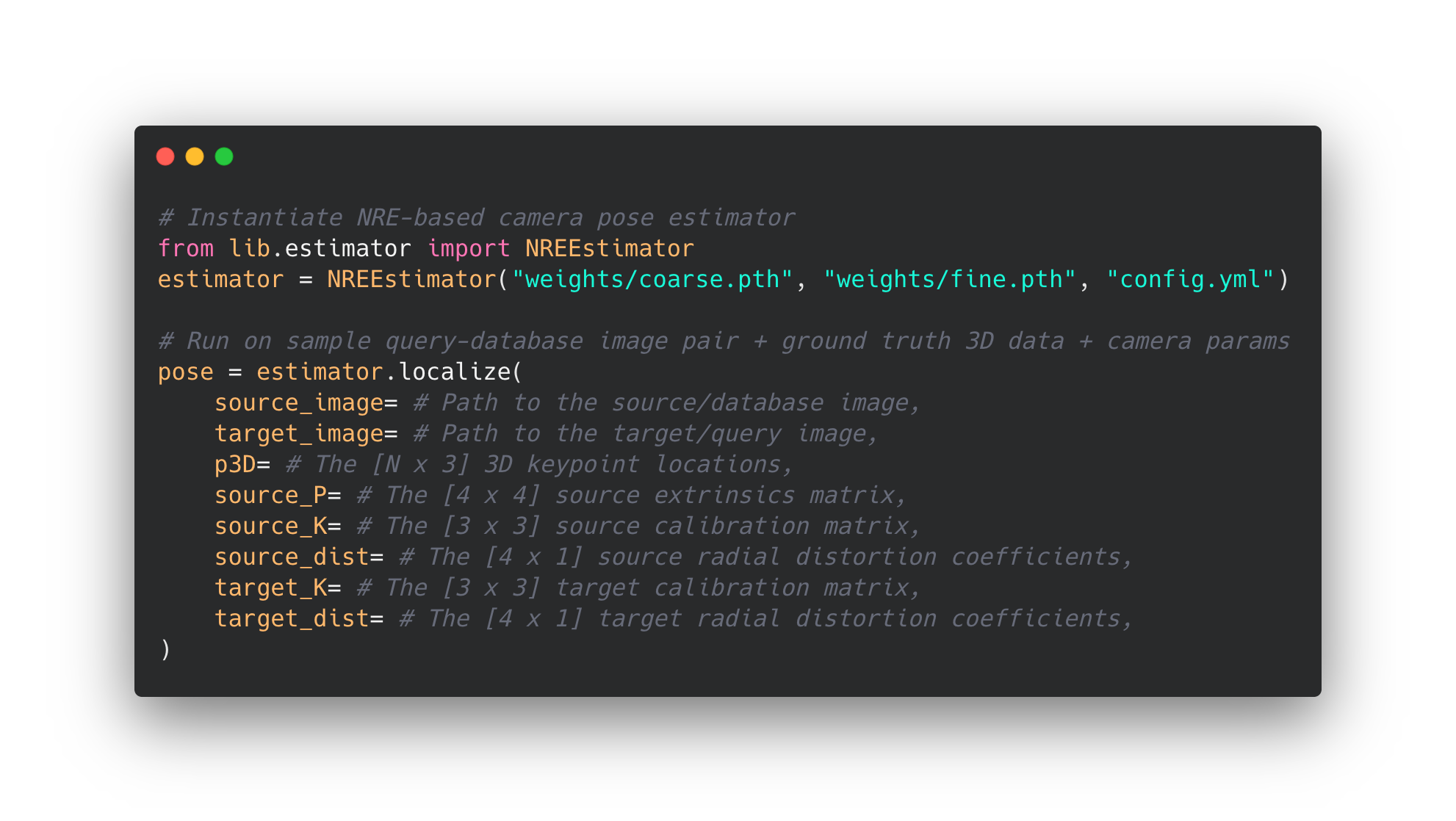
Try it
You can run NRE-based camera pose estimation on a Megadepth validation sample in example.ipynb.
You will need to have the aforementionned dependencies installed, as well as a GPU with 8Gb+ memory.
For simple visualization of the notebook try this link.
Additional parameters
For additional control over NRE-based camera pose estimation, you can tweak several parameters in config.yml.
Notably:
skip_gnc: Skip the coarse and fine GNC-IRLS refinement stepsn_iter_p3p: The number of P3P iterationstop_n_p3p: The fraction of top-N maps to run P3P.max_fine_imsize: The maximum image size for the fine forward pass. This can be reduced if you encounter memory issues, although this will most likely lead to loss in accuracy.coarse_sigma_maxandcoarse_sigma_min: Control the sigma upper and lower boundaries for the coarse GNC-IRLS. Analogous parameters are available for the fine GNC-IRLS.use_re=True: This additional parameter can be passed in theestimator.localize()method. This setting corresponds to Eq. 11 minimization in the paper).
BibTex
Please consider citing our work:
@InProceedings{Germain_2021_CVPR,
author = {Germain, Hugo and Lepetit, Vincent and Bourmaud, Guillaume},
title = {Neural Reprojection Error: Merging Feature Learning and Camera Pose Estimation},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2021},
pages = {414-423}
}
Acknowledgments
This codebase reuses some code snippets originally written by Paul-Edouard Sarlin for PixLoc.






