DeepPanoContext (DPC)
DeepPanoContext: Panoramic 3D Scene Understanding with Holistic Scene Context Graph and Relation-based Optimization
Cheng Zhang, Zhaopeng Cui, Cai Chen, Shuaicheng Liu, Bing Zeng, Hujun Bao, Yinda Zhang

Introduction
This repo contains data generation, data preprocessing, training, testing, evaluation, visualization code of our ICCV 2021 paper.
Install
Install necessary tools and create conda environment (needs to install anaconda if not available):
sudo apt install xvfb ninja-build freeglut3-dev libglew-dev meshlab
conda env create -f environment.yaml
conda activate Pano3D
python -m pip install detectron2 -f https://dl.fbaipublicfiles.com/detectron2/wheels/cu101/torch1.7/index.html
python project.py build
- When running
python project.py build, the script will runexternal/build_gaps.shwhich requires password for sudo privilege forapt-get install.
Please make sure you are running with a user with sudo privilege.
If not, please reach your administrator for installation of these libraries and comment out the corresponding lines then runpython project.py build. - If you encounter
/usr/bin/ld: cannot find -lGLproblem when building GAPS, please follow this issue.
Since the dataloader loads large number of variables,
before training, please follow this to raise the open file descriptor limits of your system.
For example, to permanently change the setting, edit /etc/security/limits.conf with a text editor and add the following lines:
* hard nofile 500000
* soft nofile 500000
root hard nofile 500000
root soft nofile 500000
Demo
Download the pretrained checkpoints
of detector, layout estimation network, and other modules.
Then unzip the folder out into the root directory of current project.
Since the given checkpoints are trained with current version of our code, which is a refactored version, the results are slightly better than those reported in our paper.
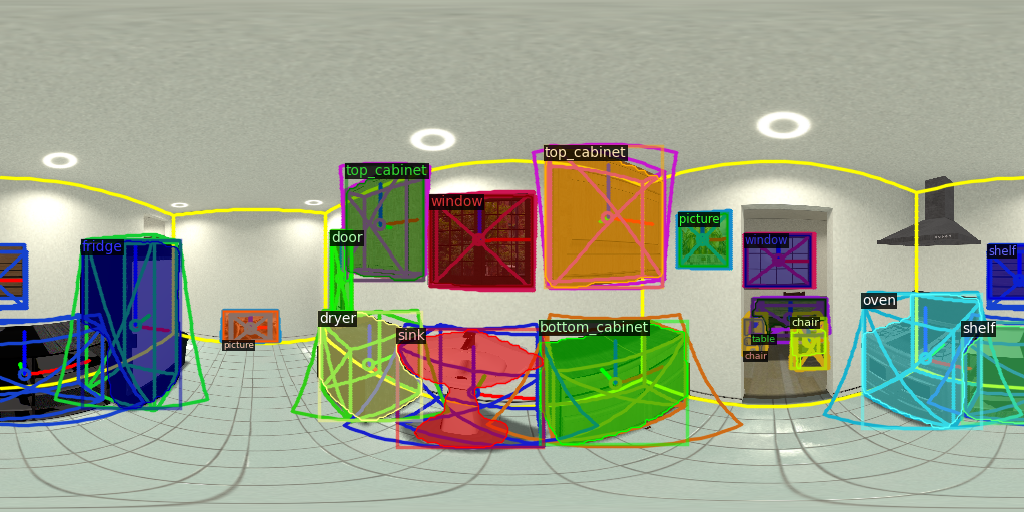
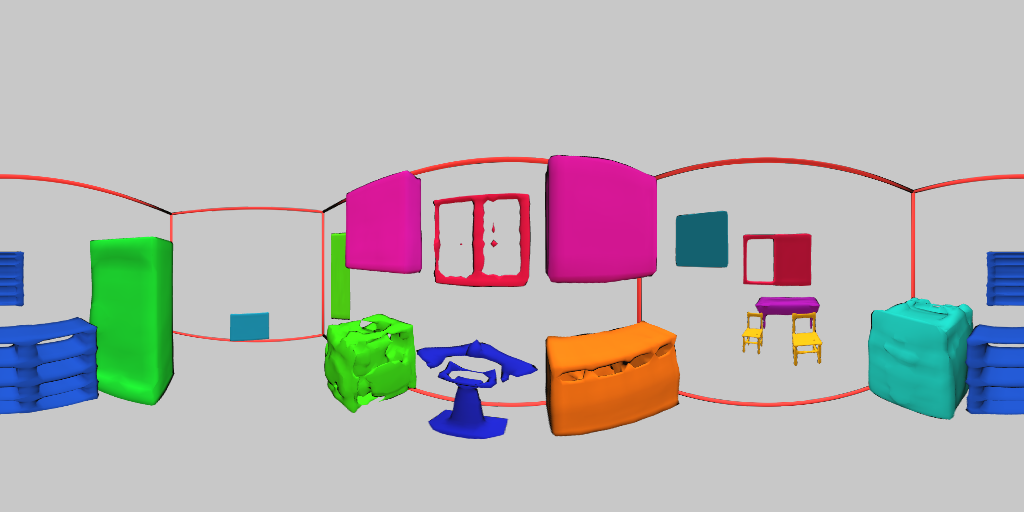
Please run the following command to predict on the given example in demo/input with our full model:
CUDA_VISIBLE_DEVICES=0 WANDB_MODE=dryrun python main.py configs/pano3d_igibson.yaml --model.scene_gcn.relation_adjust True --mode test
Or run without relation optimization:
CUDA_VISIBLE_DEVICES=0 WANDB_MODE=dryrun python main.py configs/pano3d_igibson.yaml --mode test
The results will be saved to out/pano3d/<demo_id>.
If nothing goes wrong, you should get the following results:


Data preparation
Our data is rendered with iGibson.
Here, we follow their Installation guide to download iGibson dataset, then render and preprocess the data with our code.
Download iGibson dataset with:
python -m gibson2.utils.assets_utils --download_ig_dataset
Render panorama with:
python -m utils.render_igibson_scenes --renders 10 --random_yaw --random_obj --horizon_lo --world_lo
The rendered dataset should be in data/igibson/.
Make models watertight and render/crop single object image:
python -m utils.preprocess_igibson_obj --skip_mgn
The processed results should be in data/igibson_obj/.
(Optional) Before proceeding to the training steps, you could visualize dataset ground-truth of data/igibson/ with:
python -m utils.visualize_igibson
Results ('visual.png' and 'render.png') should be saved to folder of each camera like data/igibson/Pomaria_0_int/00007.
Training and Testing
Preparation
We use the pretrained weights of Implicit3DUnderstanding for fine-tuning Bdb3d Estimation Network (BEN) and LIEN+LDIF. Please download the pretrained checkpoint
and unzip it into out/total3d/20110611514267/.
We use wandb for logging and visualizing experiments. You can follow their quickstart guide to sign up for a free account and login on your machine with wandb login. The training and testing results will be uploaded to your project "deeppanocontext".
Hint: The <XXX_id> in the commands bellow needs to be replaced with the XXX_id trained in the previous steps.
Hint: In the steps bellow, when training or testing with main.py, you can override yaml configurations with command line parameter:
CUDA_VISIBLE_DEVICES=0 python main.py configs/layout_estimation_igibson.yaml --train.epochs 100
This might be helpful when debugging or tuning hyper-parameters.
First Stage
2D Detector
Train 2D detector (Mask RCNN) with:
CUDA_VISIBLE_DEVICES=0 python train_detector.py
The trained weights will be saved to out/detector/detector_mask_rcnn
(Optional) When training 2D detector, you could visualize the training process with:
tensorboard --logdir out/detector/detector_mask_rcnn --bind_all --port 6006
(Optional) Evaluate with:
CUDA_VISIBLE_DEVICES=0 python test_detector.py
The results will be saved to out/detector/detector_mask_rcnn/evaluation_{train/test}.
Alternatively, you can visualize the prediction results on test set with:
CUDA_VISIBLE_DEVICES=0 python test_detector.py --visualize --split test
The visualization will be saved to the folder where the model weights file is.
(Optional) Visualize BFoV detection results:
CUDA_VISIBLE_DEVICES=0 python main.py configs/detector_2d_igibson.yaml --mode qtest --log.vis_step 1
The visualization will be saved to out/detector/<detector_test_id>
Layout Estimation
Train layout estimation network (HorizonNet) with:
CUDA_VISIBLE_DEVICES=0 python main.py configs/layout_estimation_igibson.yaml
The checkpoint and visualization results will be saved to out/layout_estimation/<layout_estimation_id>/model_best.pth
Save First Stage Outputs
Save predictions of 2D detector and LEN as dateset for stage 2 training:
CUDA_VISIBLE_DEVICES=0 WANDB_MODE=dryrun python main.py configs/first_stage_igibson.yaml --mode qtest --weight out/layout_estimation/<layout_estimation_id>/model_best.pth
The first stage outputs should be saved to data/igibson_stage1
(Optional) Visualize stage 1 dataset with:
python -m utils.visualize_igibson --dataset data/igibson_stage1 --skip_render
Second Stage
Object Reconstruction
Train object reconstruction network (LIEN+LDIF) with:
CUDA_VISIBLE_DEVICES=0 python main.py configs/ldif_igibson.yaml
The checkpoint and visualization results will be saved to out/ldif/<ldif_id>.
Bdb3D Estimation
Train bdb3d estimation network (BEN) with:
CUDA_VISIBLE_DEVICES=0 python main.py configs/bdb3d_estimation_igibson.yaml
The checkpoint and visualization results will be saved to out/bdb3d_estimation/<bdb3d_estimation_id>.
Relation SGCN
Train Relation SGCN without relation branch:
CUDA_VISIBLE_DEVICES=0 python main.py configs/relation_scene_gcn_igibson.yaml --model.scene_gcn.output_relation False --model.scene_gcn.loss BaseLoss --weight out/bdb3d_estimation/<bdb3d_estimation_id>/model_best.pth out/ldif/<ldif_id>/model_best.pth
The checkpoint and visualization results will be saved to out/relation_scene_gcn/<relation_sgcn_wo_rel_id>.
Train Relation SGCN with relation branch:
CUDA_VISIBLE_DEVICES=0 python main.py configs/relation_scene_gcn_igibson.yaml --weight out/relation_scene_gcn/<relation_sgcn_wo_rel_id>/model_best.pth --train.epochs 20
The checkpoint and visualization results will be saved to out/relation_scene_gcn/<relation_sgcn_id>.
Fine-tune Relation SGCN end-to-end with relation optimization:
CUDA_VISIBLE_DEVICES=0 python main.py configs/relation_scene_gcn_igibson.yaml --weight out/relation_scene_gcn/<relation_sgcn_id>/model_best.pth --model.scene_gcn.relation_adjust True --train.batch_size 1 --val.batch_size 1 --device.num_workers 2 --train.freeze shape_encoder shape_decoder --model.scene_gcn.loss_weights.bdb3d_proj 1.0 --model.scene_gcn.optimize_steps 20 --train.epochs 10
The checkpoint and visualization results will be saved to out/relation_scene_gcn/<relation_sgcn_ro_id>.
Test Full Model
Run:
CUDA_VISIBLE_DEVICES=0 python main.py configs/relation_scene_gcn_igibson.yaml --weight out/relation_scene_gcn/<relation_sgcn_ro_id>/model_best.pth --log.path out/relation_scene_gcn --resume False --finetune True --model.scene_gcn.relation_adjust True --mode qtest --model.scene_gcn.optimize_steps 100
The visualization results will be saved to out/relation_scene_gcn/<relation_sgcn_ro_test_id>.
Citation
If you find our work and code helpful, please consider cite:
@misc{zhang2021deeppanocontext,
title={DeepPanoContext: Panoramic 3D Scene Understanding with Holistic Scene Context Graph and Relation-based Optimization},
author={Cheng Zhang and Zhaopeng Cui and Cai Chen and Shuaicheng Liu and Bing Zeng and Hujun Bao and Yinda Zhang},
year={2021},
eprint={2108.10743},
archivePrefix={arXiv},
primaryClass={cs.CV}
}
@InProceedings{Zhang_2021_CVPR,
author = {Zhang, Cheng and Cui, Zhaopeng and Zhang, Yinda and Zeng, Bing and Pollefeys, Marc and Liu, Shuaicheng},
title = {Holistic 3D Scene Understanding From a Single Image With Implicit Representation},
booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2021},
pages = {8833-8842}
}
We thank the following great works:
- Total3DUnderstanding for their well-structured code. We construct our network based on their well-structured code.
- Coop for their dataset. We used their processed dataset with 2D detector prediction.
- LDIF for their novel representation method. We ported their LDIF decoder from Tensorflow to PyTorch.
- Graph R-CNN for their scene graph design. We adopted their GCN implemention to construct our SGCN.
- Occupancy Networks for their modified version of mesh-fusion pipeline.
If you find them helpful, please cite:
@InProceedings{Nie_2020_CVPR,
author = {Nie, Yinyu and Han, Xiaoguang and Guo, Shihui and Zheng, Yujian and Chang, Jian and Zhang, Jian Jun},
title = {Total3DUnderstanding: Joint Layout, Object Pose and Mesh Reconstruction for Indoor Scenes From a Single Image},
booktitle = {IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month = {June},
year = {2020}
}
@inproceedings{huang2018cooperative,
title={Cooperative Holistic Scene Understanding: Unifying 3D Object, Layout, and Camera Pose Estimation},
author={Huang, Siyuan and Qi, Siyuan and Xiao, Yinxue and Zhu, Yixin and Wu, Ying Nian and Zhu, Song-Chun},
booktitle={Advances in Neural Information Processing Systems},
pages={206--217},
year={2018}
}
@inproceedings{genova2020local,
title={Local Deep Implicit Functions for 3D Shape},
author={Genova, Kyle and Cole, Forrester and Sud, Avneesh and Sarna, Aaron and Funkhouser, Thomas},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition},
pages={4857--4866},
year={2020}
}
@inproceedings{yang2018graph,
title={Graph r-cnn for scene graph generation},
author={Yang, Jianwei and Lu, Jiasen and Lee, Stefan and Batra, Dhruv and Parikh, Devi},
booktitle={Proceedings of the European Conference on Computer Vision (ECCV)},
pages={670--685},
year={2018}
}
@inproceedings{mescheder2019occupancy,
title={Occupancy networks: Learning 3d reconstruction in function space},
author={Mescheder, Lars and Oechsle, Michael and Niemeyer, Michael and Nowozin, Sebastian and Geiger, Andreas},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
pages={4460--4470},
year={2019}
}
 chengzhag
chengzhag






