PIXOR
This is a custom implementation of the paper from Uber ATG using PyTorch 1.0. It represents the driving scene using lidar data in the Birds' Eye View (BEV) and uses a single stage object detector to predict the poses of road objects with respect to the car
Highlights
- PyTorch 1.0 Reproduced and trained from scratch using the KITTI dataset
- Fast Custom LiDAR preprocessing using C++
- Multi-GPU Training and Pytorch MultiProcessing package to speed up non-maximum suppression during evaluation
- Tensorboard Visualize trainig progress using Tensorboard
- KITTI and ROSBAG Demo Scripts that supports running inferences directly on raw KITTI data or custom rosbags.
Install
Dependencies:
- Python 3.5(3.6)
- Pytorch (Follow Official Installation Guideline)
- Tensorflow (see their website)
- Numpy, MatplotLib, OpenCV3
- PyKitti (for running on KITTI raw dataset)
- gcc
pip install shapely numpy matplotlib
git clone https://github.com/philip-huang/PIXOR
cd PIXOR/srcs/preprocess
make
(Optional) If you want to run this project on a custom rosbag containing Velodyne HDL64 scans the system must be Linux with ROS kinetic installed.
You also need to install the velodyne driver into the velodyne_ws folder.
Set up the velodyne workspace by running ./velodyne_setup.bash and press Ctrl-C as necessary.
Demo
A helper class is provided in run_kitti.py to simplify writing inference pipelines using pre-trained models. Here is how we would do it. Run this from the src folder (suppose I have already downloaded my KITTI raw data and extracted to somewhere)
from run_kitti import *
def make_kitti_video():
basedir = '/mnt/ssd2/od/KITTI/raw'
date = '2011_09_26'
drive = '0035'
dataset = pykitti.raw(basedir, date, drive)
videoname = "detection_{}_{}.avi".format(date, drive)
save_path = os.path.join(basedir, date, "{}_drive_{}_sync".format(date, drive), videoname)
run(dataset, save_path)
make_kitti_video()
Training and Evaluation
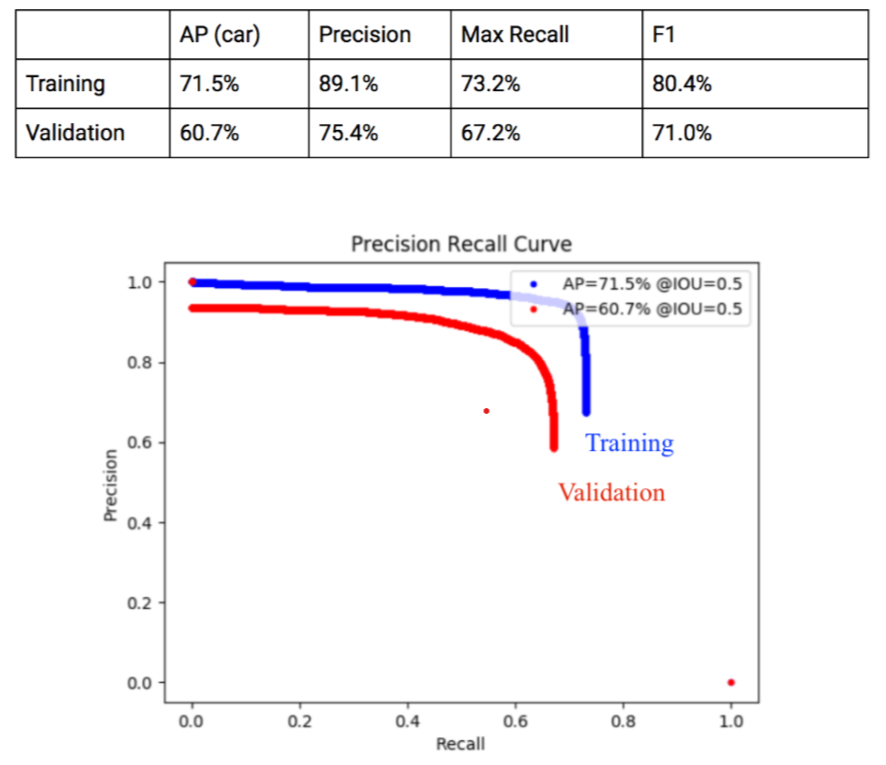
Our Training Result (as of Dec 2018)
All configuration (hyperparameters, GPUs, etc) should be put in a config.json file and save to the directory srcs/experiments/$exp_name$
To train
python srcs/main.py train (--name=$exp_name$)
To evaluate an experiment
python srcs/main.py val (--name=$exp_name$)
To display a sample result
python srcs/main.py test --name=$exp_name$
To view tensorboard
tensorboard --logdir=srcs/logs/$exp_name$
TODO
- [ ] Improve training accuracy on KITTI dataset
- [ ] Data augmentation
- [ ] Generalization gap on custom driving sequences
- [ ] Data Collection
- [ ] Improve model (possible idea: use map as a prior)
Credits
Project Contributors
- Philip Huang
- Allan Liu
Paper Citation below
@inproceedings{yang2018pixor,
title={PIXOR: Real-Time 3D Object Detection From Point Clouds},
author={Yang, Bin and Luo, Wenjie and Urtasun, Raquel}
}
We would like to thank aUToronto for genersouly sponsoring GPUs for this project


