ROS_NCNN
This is a ROS package for NCNN, a high-performance neural network inference framework - by Tencent - optimized for mobile platforms:
- ARM NEON assembly level optimization
- Sophisticated memory management and data structure design, very low memory footprint
- Supports multi-core parallel computing acceleration
- Supports GPU acceleration via the next-generation low-overhead Vulkan API
- The overall library size is less than 700K, and can be easily reduced to less than 300K
- Extensible model design, supports 8bit quantization and half-precision floating point storage
- Can import caffe/pytorch/mxnet/onnx models
Setting up
Library
- Build for NVIDIA Jetson
- Build for Linux x86
- Build for Windows x64 using VS2017
- Build for MacOSX
- Build for Raspberry Pi 3
- Build for ARM Cortex-A family with cross-compiling
- Build for Android
- Build for iOS on MacOSX with xcode
- Build for iOS on Linux with cctools-port
- Build for Hisilicon platform with cross-compiling
ROS package
- Clone this repository into your catkin workspace.
- Initialize and update submodule
ncnn-assets( this is a collection of some popular models ) - Compile the workspace.
- CMake script is going to autodetect whether the ncnn library is built with Vulkan or not. ( All nodes will utilize the GPU if Vulkan is enabled. )
General launch parameters
<node name="yolact_node" pkg="ros_ncnn" type="yolact_node" output="screen">
<param name="display_output" value="$(arg display_output)"/>
<remap from="/camera/image_raw" to="$(arg camera_topic)"/>
<!-- Select discrete GPU, in any other case the node jumps to the first discrete GPU. -->
<param name="gpu_device" value="0"/>
<!-- Number of CPU threads to use, uses all available if not provided. -->
<param name="num_threads" value="8"/>
<!-- Turns engine.neuralnet.opt.use_vulkan_compute regardless the lib is built with GPU support -->
<param name="enable_gpu" value="true"/>
</node>
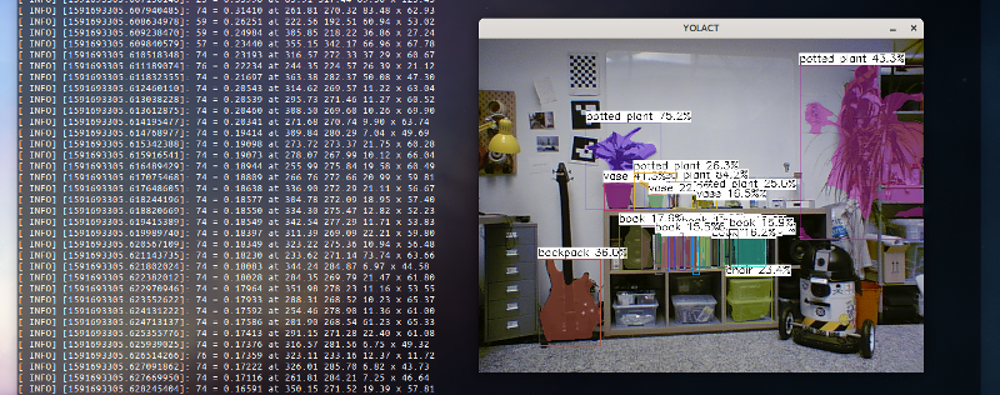
YOLACT
Publisher
# Object message
Header header
Rectangle boundingbox # Vector2D position and size
string label
float32 probability
Params
- probability_threshold - default 0.5 - above which objects are published
YOLO
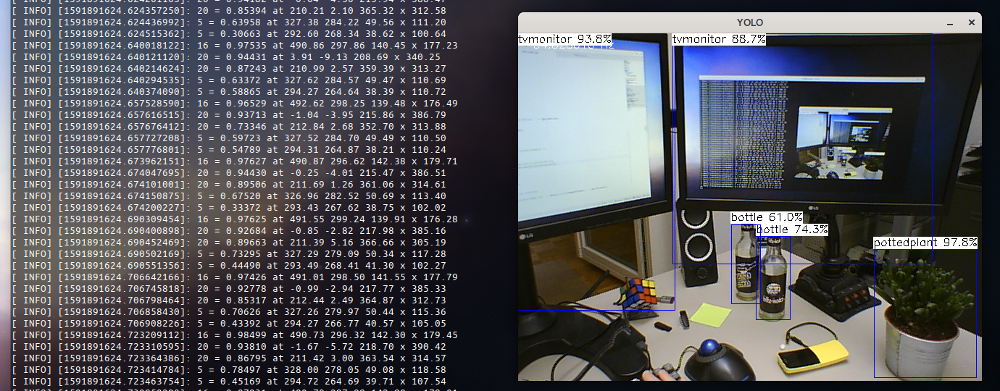
The assets repository has multiple YOLO networks, choose the parameter and model file before launch. ( Default is YOLO-3 on MobileNet-2 )
Publisher
# Object message
Header header
Rectangle boundingbox # Vector2D position and size
string label
float32 probability
Params
- model_file - YOLO network model file
- param_file - YOLO network parameter file
- probability_threshold - default 0.5 - above which objects are published
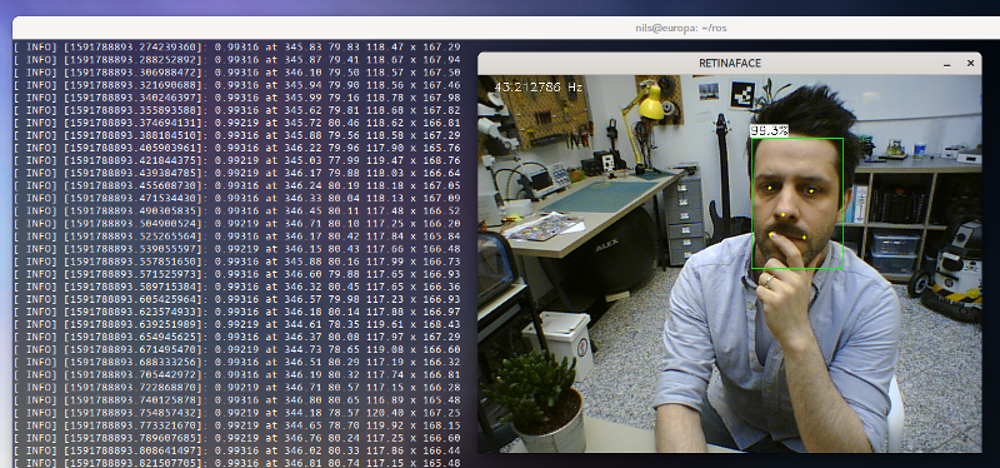
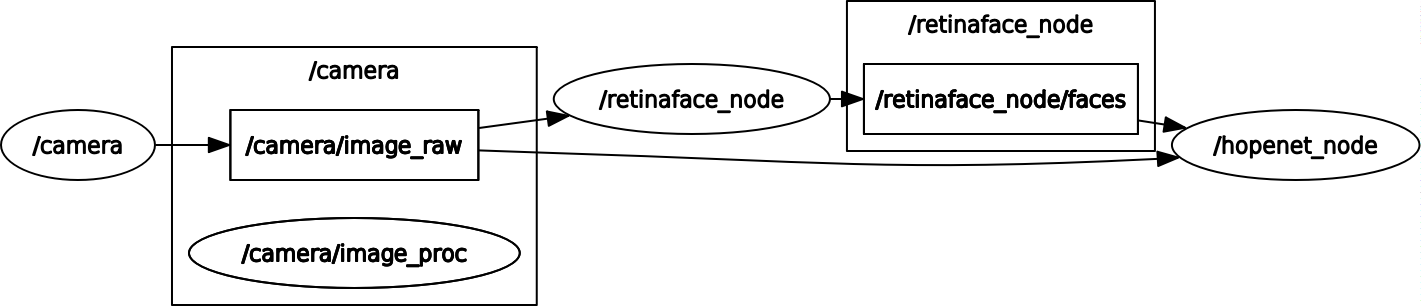
RetinaFace
Publisher
# FaceObject message
Header header
Rectangle boundingbox # Vector2D position and size
Vector2D[5] landmark # 5x 2x float32
float32 probability
Params
- probability_threshold - default 0.5 - above which face objects are published
HopeNet
Using RetinaFace as face detector:
Publisher
# Euler angles
float32 roll
float32 pitch
float32 yaw
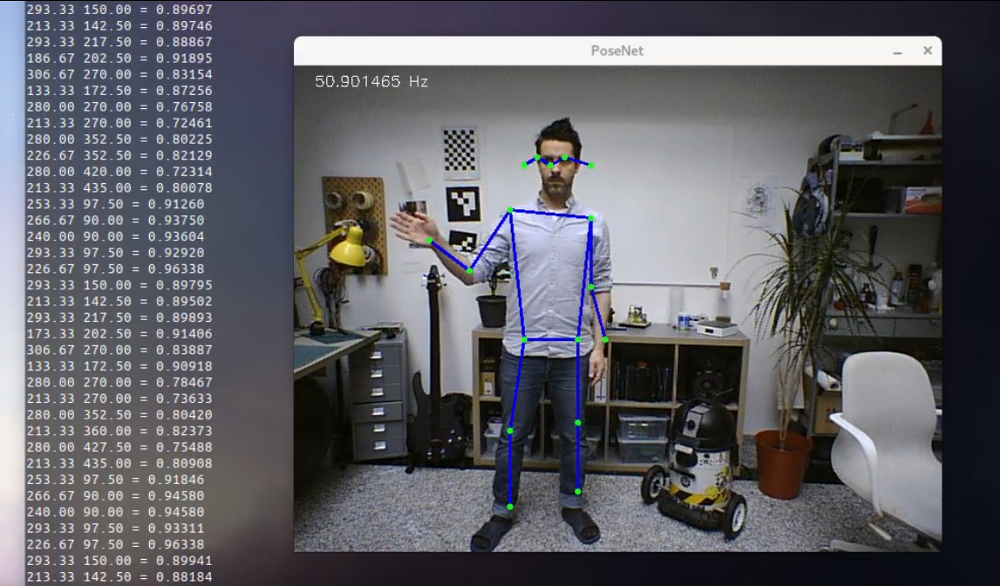
PoseNet
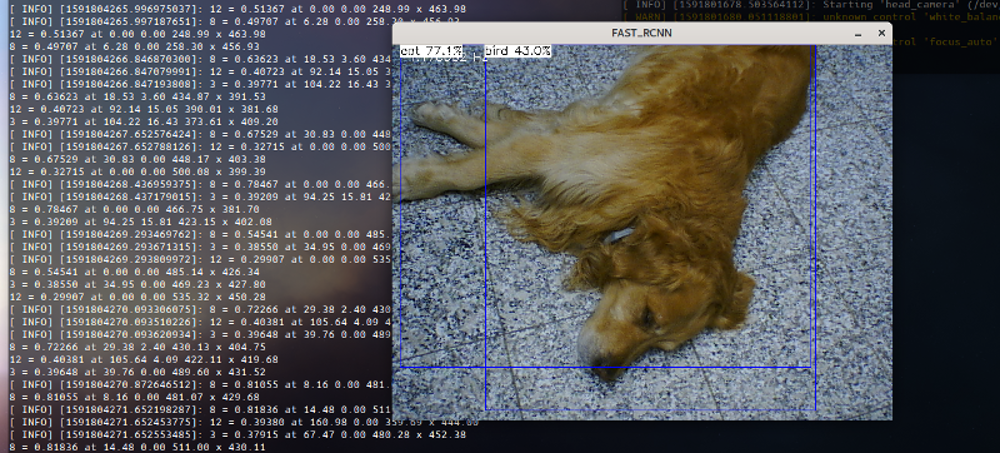
Faster R-CNN
Don't forget to uncompress ZF_faster_rcnn_final.bin.zip in assets directory first. ( but again, R-CNN is the past and that's neither a cat nor a bird right there... that's my best friend )