Deeperlab
This project aims at providing a fast, modular reference implementation for semantic segmentation models using PyTorch.
Highlights
- Distributed Training: >60% Thank you ycszen, from his struct faster than the multi-thread parallel method(nn.DataParallel), we use the multi-processing parallel method.
- Multi-GPU training and inference: support different manners of inference.
- Provides pre-trained models and implement different semantic segmentation models.
Prerequisites
- PyTorch 1.0
pip3 install torch torchvision
- Easydict
pip3 install easydict
- Apex
- Ninja
sudo apt-get install ninja-build
- tqdm
pip3 install tqdm
Pretrain Model
- xception-71(pretrain)
Model Zoo
Supported Model
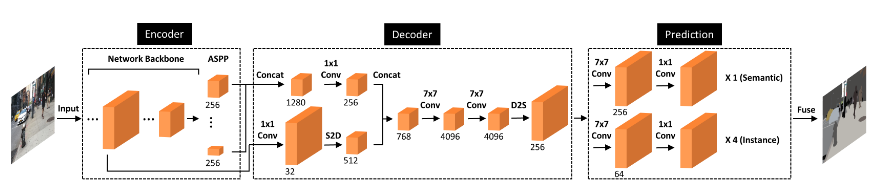
- deeperlab(CVPR2019)
Performance and Benchmarks
SS:Single Scale MSF:Multi-scale + Flip
PASCAL VOC 2012(SBD and Never SBD)
because I only realize the segmentation part,I tested its results on voc
| Methods | Backbone | TrainSet | EvalSet | Mean IoU(SS) | Mean IoU(MSF) | Model |
|---|---|---|---|---|---|---|
| deeperlab(ours+SBD) | R101_v1c | train_aug | val | 79.71 | 80.26 | BaiduYun / GoogleDrive |
| deeperlab(ours) | R101_v1c | train_aug | val | 73.28 | 74.11 | BaiduYun / GoogleDrive |
To Do
- [ ] Detection part
Link
we must build the env for training
make link
make others
soft link to data,pretrain,log,logger
Training
- create the config file of dataset:
train.txt,val.txt,test.txt
file structure:(split withtab)path-of-the-image path-of-the-groundtruth - modify the
config.pyaccording to your requirements - train a network:
Distributed Training
We use the official torch.distributed.launch in order to launch multi-gpu training. This utility function from PyTorch spawns as many Python processes as the number of GPUs we want to use, and each Python process will only use a single GPU.
For each experiment, you can just run this script:
export NGPUS=8
python -m torch.distributed.launch --nproc_per_node=$NGPUS train.py
Non-distributed Training
The above performance are all conducted based on the non-distributed training.
For each experiment, you can just run this script:
bash train.sh
In train.sh, the argument of d means the GPU you want to use.
Inference
In the evaluator, we have implemented the multi-gpu inference base on the multi-process. In the inference phase, the function will spawns as many Python processes as the number of GPUs we want to use, and each Python process will handle a subset of the whole evaluation dataset on a single GPU.
- evaluate a trained network on the validation set:
bash eval.sh - input arguments in shell:
usage: -e epoch_idx -d device_idx -c save_csv [--verbose ] [--show_image] [--save_path Pred_Save_Path]
Segmentation-torch
if you are interested my algorithm, you can see my realized segmentation tool(dfn,deeperlab,deeplabv3 plus and so on):
Be Care for
because my device is 1080, we can't use 7*7 conv in two 4096 channel due to out of memory. so if you use it. you can change it in model/deeperlab.py



