SynLiDAR dataset: Learning From Synthetic LiDAR Sequential Point Cloud
This is official repository of the SynLiDAR dataset. For technical details, please refer to:
SynLiDAR: Learning From Synthetic LiDAR Sequential Point Cloud for Semantic Segmentation (Paper)
Aoran Xiao, Jiaxing Huang, Dayan Guan, Fangneng Zhan, Shijian Lu
Dataset
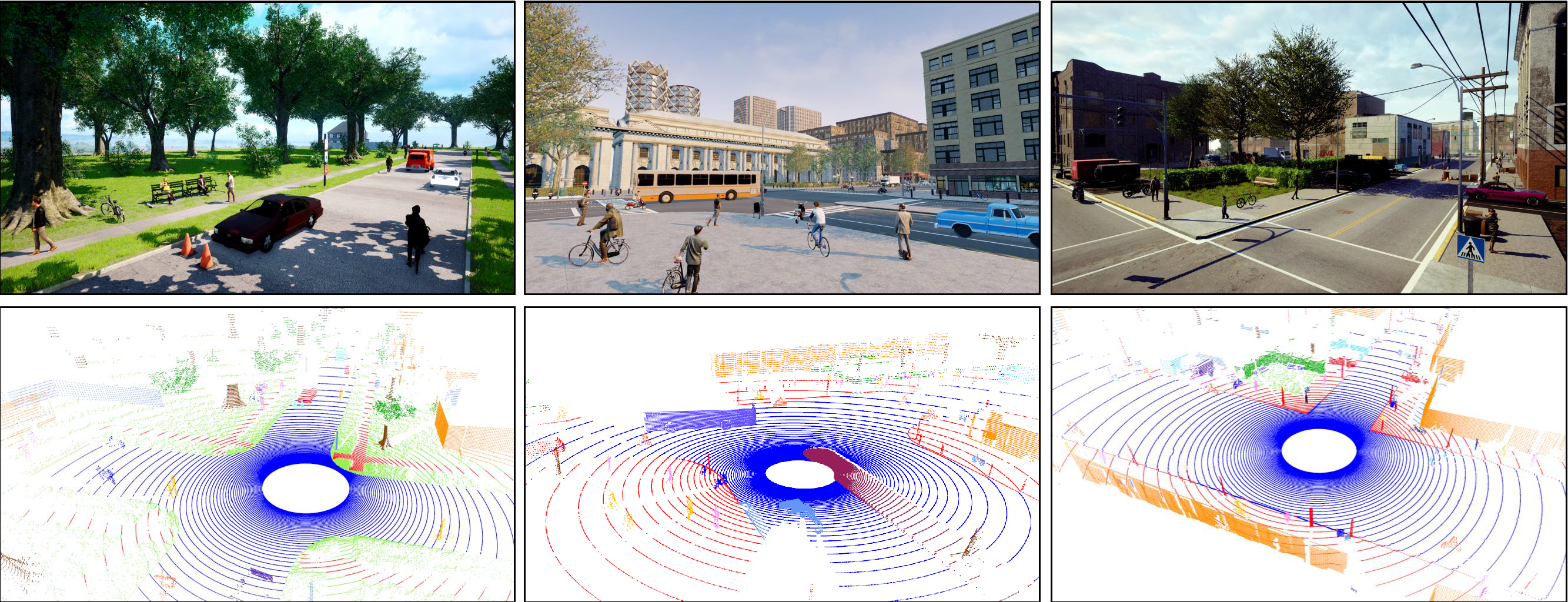
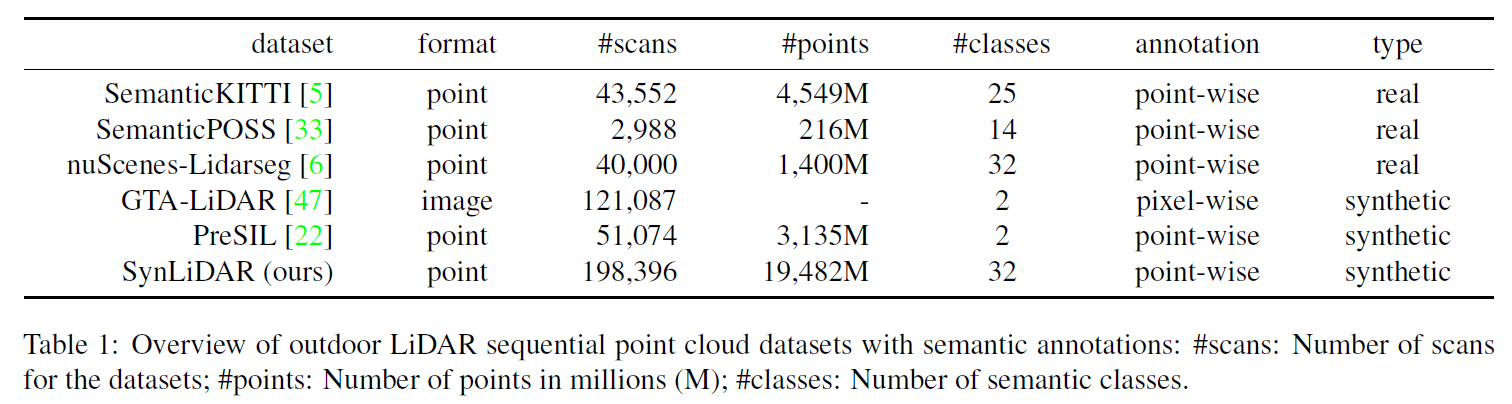
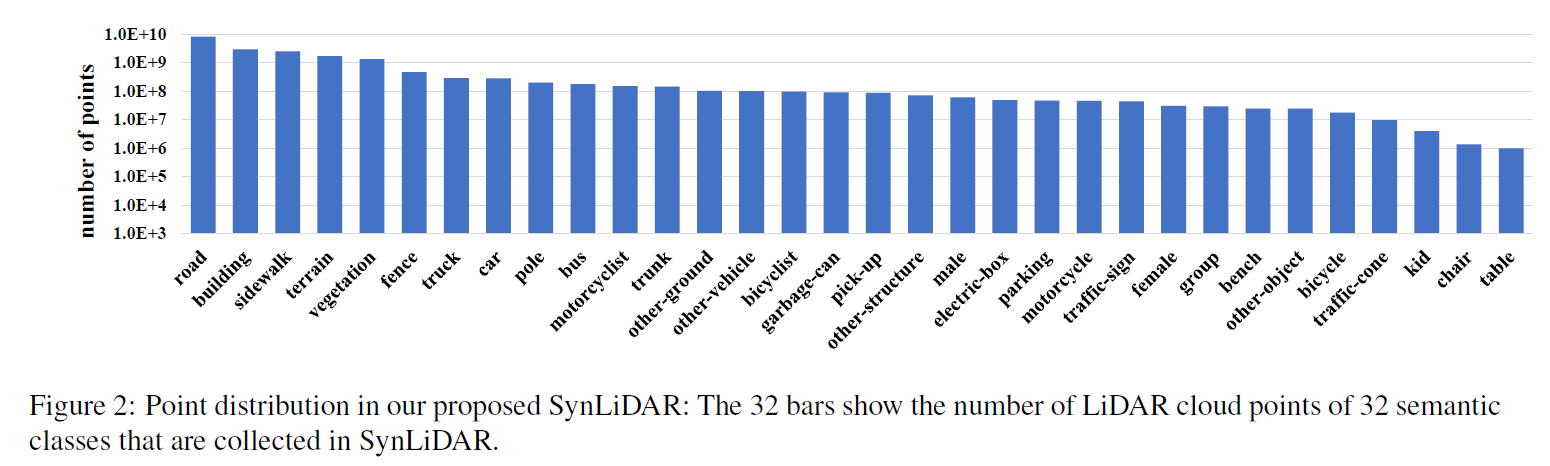
SynLiDAR is a large-scale synthetic LiDAR sequential point cloud dataset with point-wise annotations. 13 sequences of LiDAR point cloud with around 20k scans (over 19 billion
points and 32 semantic classes) are collected from virtual urban cities, suburban towns, neighborhood, and harbor.
Download (245.3GB)
-
You can download SynLiDAR through browser → DR-NTU
-
You can also download through provided python script, this requires installing pyDataverse
pip install pyDataverse
python download.py
Note: For most of sequences, we compressed and split them into multiple small files. Please download them and cat into one file before extraction. E.g. for sequence 01:
cat 01*>01.tar.gz
tar -zxvf 11.tar.gz
The data should organized in the following format:
/SynLiDAR/
└── 00/
└── velodyne
└── 000000.bin
├── 000001.bin
...
└── labels
└── 000000.label
├── 000001.label
...
...
└── annotations.yaml
└── read_data.py
We provide class annotations (in 'annotations.yaml') and example python code for reading data (in 'read_data.py').
Citation
If you find our work useful in your research, please consider citing:
@article{xiao2021synlidar,
title={SynLiDAR: Learning From Synthetic LiDAR Sequential Point Cloud for Semantic Segmentation},
author={Xiao, Aoran and Huang, Jiaxing and Guan, Dayan and Zhan, Fangneng and Lu, Shijian},
journal={arXiv preprint arXiv:2107.05399},
year={2021}
}




