Progressive Coordinate Transforms for Monocular 3D Object Detection
This repository is the official implementation of PCT.
Introduction
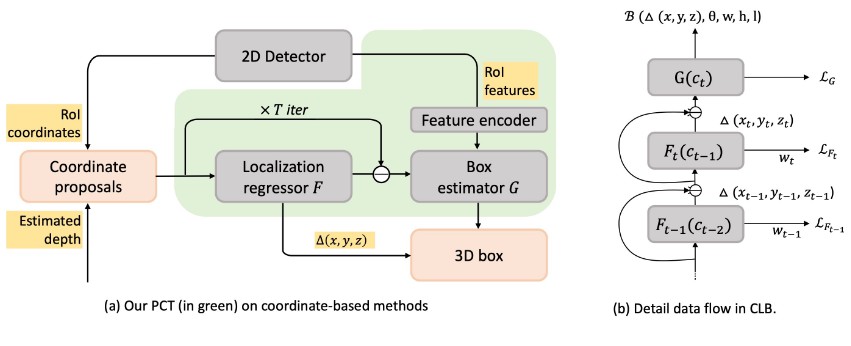
In this paper, we propose a novel and lightweight approach, dubbed Progressive Coordinate Transforms (PCT) to facilitate learning coordinate representations for monocular 3D object detection. Specifically, a localization boosting mechanism with confidence-aware loss is introduced to progressively refine the localization prediction. In addition, semantic image representation is also exploited to compensate for the usage of patch proposals. Despite being lightweight and simple, our strategy allows us to establish a new state-of-the-art among the monocular 3D detectors on the competitive KITTI benchmark. At the same time, our proposed PCT shows great generalization to most coordinate-based 3D detection frameworks.
Requirements
Installation
Download this repository (tested under python3.7, pytorch1.3.1 and ubuntu 16.04.7). There are also some dependencies like cv2, yaml, tqdm, etc., and please install them accordingly:
cd #root
pip install -r requirements
Then, you need to compile the evaluation script:
cd root/tools/kitti_eval
sh compile.sh
Prepare your data
First, you should download the KITTI dataset, and organize the data as follows (* indicates an empty directory to store the data generated in subsequent steps):
#ROOT
|data
|KITTI
|2d_detections
|ImageSets
|pickle_files *
|object
|training
|calib
|image_2
|label
|depth *
|pseudo_lidar (optional for Pseudo-LiDAR)*
|velodyne (optional for FPointNet)
|testing
|calib
|image_2
|depth *
|pseudo_lidar (optional for Pseudo-LiDAR)*
|velodyne (optional for FPointNet)
Second, you need to prepare your depth maps and put them to data/KITTI/object/training/depth. For ease of use, we also provide the estimated depth maps (these data generated from the pretrained models provided by DORN and Pseudo-LiDAR).
| Monocular (DORN) | Stereo (PSMNet) |
|---|---|
| trainval(~1.6G), test(~1.6G) | trainval(~2.5G) |
Then, you need to generate image 2D features for the 2D bounding boxes and put them to data/KITTI/pickle_files/org. We train the 2D detector according to the 2D detector in RTM3D. You can also use your own 2D detector for training and inference.
Finally, generate the training data using provided scripts :
cd #root/tools/data_prepare
python patch_data_prepare_val.py --gen_train --gen_val --gen_val_detection --car_only
mv *.pickle ../../data/KITTI/pickle_files
Prepare Waymo dataset
We also provide Waymo Usage for monocular 3D detection.
Training
Move to the workplace and train the mode (also need to modify the path of pickle files in config file):
cd #root
cd experiments/pct
python ../../tools/train_val.py --config config_val.yaml
Evaluation
Generate the results using the trained model:
python ../../tools/train_val.py --config config_val.yaml --e
and evalute the generated results using:
../../tools/kitti_eval/evaluate_object_3d_offline_ap11 ../../data/KITTI/object/training/label_2 ./output
or
../../tools/kitti_eval/evaluate_object_3d_offline_ap40 ../../data/KITTI/object/training/label_2 ./output
we provide the generated results for evaluation due to the tedious process of data preparation process. Unzip the output.zip and then execute the above evaluation commonds. Result is:
| Models | AP3D11@mod. | AP3D11@easy | AP3D11@hard |
|---|---|---|---|
| PatchNet + PCT | 27.53 / 34.65 | 38.39 / 47.16 | 24.44 / 28.47 |
Acknowledgements
This code benefits from the excellent work PatchNet, and use the off-the-shelf models provided by DORN and RTM3D.
Citation
@article{wang2021pct,
title={Progressive Coordinate Transforms for Monocular 3D Object Detection},
author={Li Wang, Li Zhang, Yi Zhu, Zhi Zhang, Tong He, Mu Li, Xiangyang Xue},
journal={arXiv preprint arXiv:2108.05793},
year={2021}
}
Contact
For questions regarding PCT-3D, feel free to post here or directly contact the authors ([email protected]).
License
This project is licensed under the Apache-2.0 License.
GitHub
https://github.com/amazon-research/progressive-coordinate-transforms







