SingleHDR
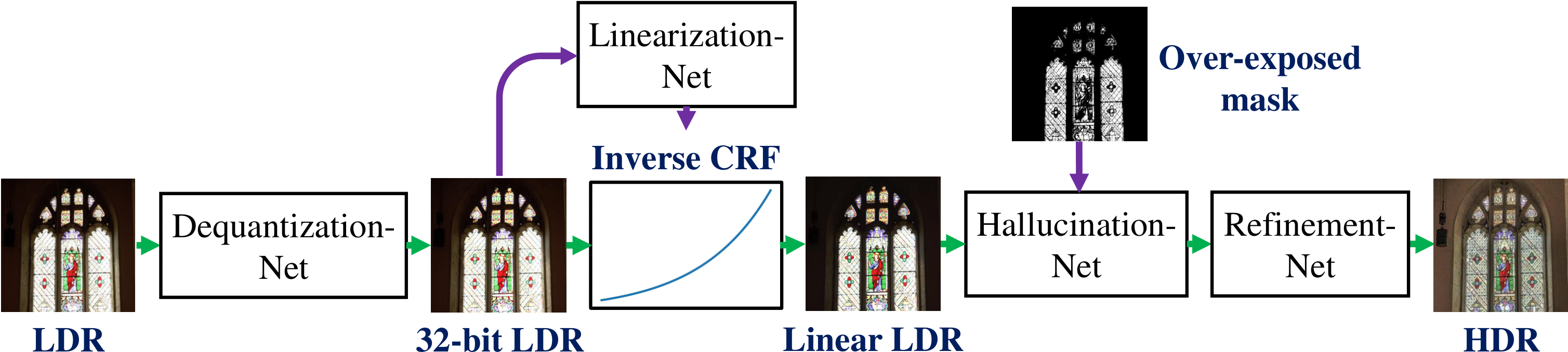
Recovering a high dynamic range (HDR) image from asingle low dynamic range (LDR) input image is challenging due to missing details in under-/over-exposed regions caused by quantization and saturation of camera sensors. In contrast to existing learning-based methods, our core idea is to incorporate the domain knowledge of the LDR image formation pipeline into our model. We model the HDR-to-LDR image formation pipeline as the (1) dynamic range clipping, (2) non-linear mapping from a camera response function, and (3) quantization. We then propose to learn three specialized CNNs to reverse these steps. By decomposing the problem into specific sub-tasks, we impose effective physical constraints to facilitate the training of individual sub-networks. Finally, we jointly fine-tune the entire model end-to-end to reduce error accumulation. With extensive quantitative and qualitative experiments on diverse image datasets, we demonstrate that the proposed method performs favorably against state-of-the-art single-image HDR reconstruction algorithms. The source code, datasets, and pre-trained model are available at our project website.
[Project]
Paper

Overview
This is the author's reference implementation of the single-image HDR reconstruction using TensorFlow described in:
"Single-Image HDR Reconstruction by Learning to Reverse the Camera Pipeline"
Yu-Lun Liu, Wei-Sheng Lai, Yu-Sheng Chen, Yi-Lung Kao, Ming-Hsuan Yang, Yung-Yu Chuang, Jia-Bin Huang (National Taiwan University & Google & Virginia Tech & University of California at Merced & MediaTek Inc.)
in CVPR 2020.
If you find this code useful for your research, please consider citing the following paper.
Further information please contact Yu-Lun Liu.
Requirements setup
-
- tested using TensorFlow 1.10.0
-
To download the pre-trained models:
Usage
- Run your own images (using the model trained on our synthetic training data):
CUDA_VISIBLEDEVICES=0 python3 test_real.py --ckpt_path_deq ckpt_deq/model.ckpt --ckpt_path_lin ckpt_lin/model.ckpt --ckpt_path_hal ckpt_hal/model.ckpt --test_imgs ./imgs --output_path output_hdrs
- Run your own images (using the model fine-tuned on both synthetic and real training data):
CUDA_VISIBLEDEVICES=0 python3 test_real_refinement.py --ckpt_path refinement_log_from_wo_raw/model.ckpt --test_imgs ./imgs --output_path output_hdrs



