DexYCB Toolkit
DexYCB Toolkit is a Python package that provides evaluation and visualization tools for the DexYCB dataset. The dataset and results were initially described in a CVPR 2021 paper:
DexYCB: A Benchmark for Capturing Hand Grasping of Objects
Yu-Wei Chao, Wei Yang, Yu Xiang, Pavlo Molchanov, Ankur Handa, Jonathan Tremblay, Yashraj S. Narang, Karl Van Wyk, Umar Iqbal, Stan Birchfield, Jan Kautz, Dieter Fox
IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021
Citing DexYCB Toolkit
Please cite DexYCB Toolkit if it helps your research:
@INPROCEEDINGS{chao:cvpr2021,
author = {Yu-Wei Chao and Wei Yang and Yu Xiang and Pavlo Molchanov and Ankur Handa and Jonathan Tremblay and Yashraj S. Narang and Karl {Van Wyk} and Umar Iqbal and Stan Birchfield and Jan Kautz and Dieter Fox},
booktitle = {IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
title = {{DexYCB}: A Benchmark for Capturing Hand Grasping of Objects},
year = {2021},
}
License
DexYCB Toolkit is released under the GNU General Public License v3.0(LICENSE).
Prerequisites
This code is tested with Python 3.7 on Linux.
Installation
For good practice for Python package management, it is recommended to use virtual environments (e.g., virtualenv or conda) to ensure packages from different projects do not interfere with each other.
-
Clone the repo with
--recursiveand and cd into it:git clone --recursive [email protected]:NVlabs/dex-ycb-toolkit.git cd dex-ycb-toolkit -
Install the dex-ycb-toolkit package and dependencies:
# Install dex-ycb-toolkit pip install -e . # Install bop_toolkit dependencies cd bop_toolkit pip install -r requirements.txt cd .. # Install manopth cd manopth pip install -e . cd .. -
Download the DexYCB dataset from the project site.
-
Set the environment variable for dataset path:
export DEX_YCB_DIR=/path/to/dex-ycb$DEX_YCB_DIRshould be a folder with the following structure:├── 20200709-subject-01/ ├── 20200813-subject-02/ ├── ... ├── calibration/ └── models/ -
Download MANO models and code (
mano_v1_2.zip) from the MANO website and place the file undermanopath. Unzip the file and create symlink:cd manopth unzip mano_v1_2.zip cd mano ln -s ../mano_v1_2/models models cd ../..
Loading Dataset and Visualizing Samples
-
The example below shows how to create a DexYCB dataset given setup (e.g.,
s0) and split name (e.g.,train). Once created, you can use the dataset to fetch image samples.python examples/create_dataset.pyYou should see the following output (click to expand):
Dataset name: s0_train Dataset size: 465504 1000th sample: { "color_file": "/datasets/dex-ycb-20201205/20200709-subject-01/20200709_141841/932122060861/color_000053.jpg", "depth_file": "/datasets/dex-ycb-20201205/20200709-subject-01/20200709_141841/932122060861/aligned_depth_to_color_000053.png", "label_file": "/datasets/dex-ycb-20201205/20200709-subject-01/20200709_141841/932122060861/labels_000053.npz", "intrinsics": { "fx": 613.0762329101562, "fy": 611.9989624023438, "ppx": 313.0279846191406, "ppy": 245.00865173339844 }, "ycb_ids": [ 1, 11, 12, 20 ], "ycb_grasp_ind": 0, "mano_side": "right", "mano_betas": [ 0.6993994116783142, -0.16909725964069366, -0.8955091834068298, -0.09764610230922699, 0.07754238694906235, 0.336286723613739, -0.05547792464494705, 0.5248727798461914, -0.38668063282966614, -0.00133091164752841 ] } . . .Each sample includes the paths to the color and depth image, path to the label file, camera intrinsics, presented YCB objects' ID, index of the object being grasped, whether right or left hand, and the hand's MANO shape parameter.
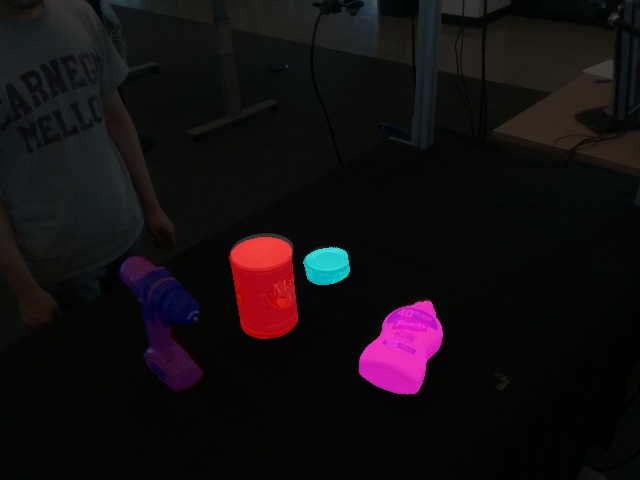
Each label file contains the following annotations packed in a dictionary:
seg: A unit8 numpy array of shape[H, W]containing the segmentation map. The label of each pixel can be0(background),1-21(YCB object), or255(hand).pose_y: A float32 numpy array of shape[num_obj, 3, 4]holding the 6D pose of each object. Each 6D pose is represented by[R; t], whereRis the3x3rotation matrix andtis the3x1translation.pose_m: A float32 numpy array of shape[1, 51]holding the pose of the hand.pose_m[:, 0:48]stores the MANO pose coefficients in PCA representation, andpose_m[0, 48:51]stores the translation. If the image does not have a visible hand or the annotation does not exist,pose_mwill be all0.joint_3d: A float32 numpy array of shape[1, 21, 3]holding the 3D joint position of the hand in the camera coordinates. The joint order is specified here. If the image does not have a visible hand or the annotation does not exist,joint_3dwill be all-1.joint_2d: A float32 numpy array of shape[1, 21, 2]holding the 2D joint position of the hand in the image space. The joint order followsjoint_3d. If the image does not have a visible hand or the annotation does not exist,joint_2dwill be all-1.
-
The example below shows how to visualize ground-truth object and hand pose of one image sample.
python examples/visualize_pose.py

Evaluation
DexYCB provides a benchmark to evaluate four tasks: (1) 2D object and keypoint detection (COCO), (2) 6D object pose estimation (BOP), (3) 3D hand pose estimation (HPE), and (4) safe human-to-robot object handover (Grasp).
Below we provide instructions and examples to run these evaluations. To run the examples, you need to first download the example results.
./results/fetch_example_results.sh
COCO Evaluation
-
The example below shows how to run COCO evaluation using an example result file. The output will be logged to
results/coco_eval_s0_test_example_results_coco_s0_test.log.python examples/evaluate_coco.pyYou should see the following output (click to expand):
Evaluation results for *bbox*: | AP | AP50 | AP75 | APs | APm | APl | |:-----:|:------:|:------:|:-----:|:-----:|:-----:| | 2.970 | 2.970 | 2.970 | 3.065 | 3.017 | 2.723 | Per-category *bbox* AP: | category | AP | category | AP | category | AP | |:--------------------|:------|:----------------------|:------|:--------------------|:------| | 002_master_chef_can | 2.970 | 003_cracker_box | 2.970 | 004_sugar_box | 2.970 | | 005_tomato_soup_can | 2.970 | 006_mustard_bottle | 2.970 | 007_tuna_fish_can | 2.970 | | 008_pudding_box | 2.970 | 009_gelatin_box | 2.970 | 010_potted_meat_can | 2.970 | | 011_banana | 2.970 | 019_pitcher_base | 2.970 | 021_bleach_cleanser | 2.970 | | 024_bowl | 2.970 | 025_mug | 2.970 | 035_power_drill | 2.970 | | 036_wood_block | 2.970 | 037_scissors | 2.970 | 040_large_marker | 2.970 | | 051_large_clamp | nan | 052_extra_large_clamp | 2.970 | 061_foam_brick | 2.970 | | hand | 2.970 | | | | | Evaluation results for *segm*: | AP | AP50 | AP75 | APs | APm | APl | |:-----:|:------:|:------:|:-----:|:-----:|:-----:| | 2.970 | 2.970 | 2.970 | 3.065 | 3.017 | 2.723 | Per-category *segm* AP: | category | AP | category | AP | category | AP | |:--------------------|:------|:----------------------|:------|:--------------------|:------| | 002_master_chef_can | 2.970 | 003_cracker_box | 2.970 | 004_sugar_box | 2.970 | | 005_tomato_soup_can | 2.970 | 006_mustard_bottle | 2.970 | 007_tuna_fish_can | 2.970 | | 008_pudding_box | 2.970 | 009_gelatin_box | 2.970 | 010_potted_meat_can | 2.970 | | 011_banana | 2.970 | 019_pitcher_base | 2.970 | 021_bleach_cleanser | 2.970 | | 024_bowl | 2.970 | 025_mug | 2.970 | 035_power_drill | 2.970 | | 036_wood_block | 2.970 | 037_scissors | 2.970 | 040_large_marker | 2.970 | | 051_large_clamp | nan | 052_extra_large_clamp | 2.970 | 061_foam_brick | 2.970 | | hand | 2.970 | | | | | Evaluation results for *keypoints*: | AP | AP50 | AP75 | APm | APl | |:-----:|:------:|:------:|:-----:|:-----:| | 2.970 | 2.970 | 2.970 | 2.970 | 2.970 | Per-category *keypoints* AP: | category | AP | category | AP | category | AP | |:--------------------|:------|:----------------------|:-----|:--------------------|:-----| | 002_master_chef_can | nan | 003_cracker_box | nan | 004_sugar_box | nan | | 005_tomato_soup_can | nan | 006_mustard_bottle | nan | 007_tuna_fish_can | nan | | 008_pudding_box | nan | 009_gelatin_box | nan | 010_potted_meat_can | nan | | 011_banana | nan | 019_pitcher_base | nan | 021_bleach_cleanser | nan | | 024_bowl | nan | 025_mug | nan | 035_power_drill | nan | | 036_wood_block | nan | 037_scissors | nan | 040_large_marker | nan | | 051_large_clamp | nan | 052_extra_large_clamp | nan | 061_foam_brick | nan | | hand | 2.970 | | | | | Evaluation complete. -
Results format: You should store the results in a
.jsonfile following the COCO results format. The results should be a list of dictionary items with the following key-value pairs:image_id: Index of an image sample.category_id: Object category ID. The value can be0(background),1-21(YCB object), or22(hand).bbox: Bounding box in[x, y, width, height]. Required for thebboxtask.score: Detection score.segmentation: Segmentation in RLE. Required for thesegmtask.keypoints: Keypoints in[x1, y1, v1, ..., x21, y21, v21]. Required for thekeypointstask.
You can also look at the example result files in
results/example_results_coco_*.json. -
To evaluate on your own results, simply add
--nameto specify the setup and split and--res_fileto specify the path to the result file. For example:python examples/evaluate_coco.py \ --name s0_test \ --res_file path/to/results.json
BOP Evaluation
-
The example below shows how to run BOP evaluation using an example result file. The output will be logged to
results/bop_eval_s0_test_example_results_bop_s0_test.log.python examples/evaluate_bop.pyYou should see the following output (click to expand):
Deriving results for *all* Evaluation results for *all*: | vsd | mssd | mspd | mean | |:-----:|:------:|:------:|:------:| | 0.129 | 0.123 | 0.177 | 0.143 | Per-object scores for *all*: | object | vsd | mssd | mspd | mean | |:----------------------|------:|-------:|-------:|-------:| | 002_master_chef_can | 0.768 | 0.768 | 0.768 | 0.768 | | 003_cracker_box | 0.818 | 0.812 | 0.812 | 0.814 | | 004_sugar_box | 0.000 | 0.000 | 0.000 | 0.000 | | 005_tomato_soup_can | 0.000 | 0.000 | 0.000 | 0.000 | | 006_mustard_bottle | 0.000 | 0.000 | 0.000 | 0.000 | | 007_tuna_fish_can | 0.000 | 0.000 | 0.098 | 0.033 | | 008_pudding_box | 0.113 | 0.000 | 0.098 | 0.071 | | 009_gelatin_box | 0.000 | 0.000 | 0.022 | 0.007 | | 010_potted_meat_can | 0.000 | 0.000 | 0.017 | 0.006 | | 011_banana | 0.000 | 0.000 | 0.000 | 0.000 | | 019_pitcher_base | 0.001 | 0.000 | 0.000 | 0.000 | | 021_bleach_cleanser | 0.029 | 0.000 | 0.000 | 0.010 | | 024_bowl | 0.000 | 0.000 | 0.015 | 0.005 | | 025_mug | 0.870 | 0.870 | 0.933 | 0.891 | | 035_power_drill | 0.000 | 0.000 | 0.004 | 0.001 | | 036_wood_block | 0.000 | 0.000 | 0.000 | 0.000 | | 037_scissors | 0.000 | 0.011 | 0.021 | 0.011 | | 040_large_marker | 0.000 | 0.000 | 0.105 | 0.035 | | 052_extra_large_clamp | 0.000 | 0.000 | 0.205 | 0.068 | | 061_foam_brick | 0.000 | 0.000 | 0.532 | 0.177 | Deriving results for *grasp only* Evaluation results for *grasp only*: | vsd | mssd | mspd | mean | |:-----:|:------:|:------:|:------:| | 0.160 | 0.160 | 0.268 | 0.196 | Per-object scores for *grasp only*: | object | vsd | mssd | mspd | mean | |:----------------------|------:|-------:|-------:|-------:| | 002_master_chef_can | 3.115 | 3.114 | 3.114 | 3.114 | | 003_cracker_box | 0.024 | 0.000 | 0.000 | 0.008 | | 004_sugar_box | 0.000 | 0.000 | 0.000 | 0.000 | | 005_tomato_soup_can | 0.000 | 0.000 | 0.000 | 0.000 | | 006_mustard_bottle | 0.000 | 0.000 | 0.000 | 0.000 | | 007_tuna_fish_can | 0.000 | 0.000 | 0.028 | 0.009 | | 008_pudding_box | 0.000 | 0.000 | 0.000 | 0.000 | | 009_gelatin_box | 0.000 | 0.000 | 0.100 | 0.033 | | 010_potted_meat_can | 0.000 | 0.000 | 0.072 | 0.024 | | 011_banana | 0.000 | 0.000 | 0.000 | 0.000 | | 019_pitcher_base | 0.003 | 0.000 | 0.000 | 0.001 | | 021_bleach_cleanser | 0.000 | 0.000 | 0.000 | 0.000 | | 024_bowl | 0.000 | 0.000 | 0.061 | 0.020 | | 025_mug | 0.000 | 0.000 | 0.232 | 0.077 | | 035_power_drill | 0.000 | 0.000 | 0.017 | 0.006 | | 036_wood_block | 0.000 | 0.000 | 0.000 | 0.000 | | 037_scissors | 0.000 | 0.044 | 0.078 | 0.041 | | 040_large_marker | 0.000 | 0.000 | 0.344 | 0.115 | | 052_extra_large_clamp | 0.000 | 0.000 | 0.385 | 0.128 | | 061_foam_brick | 0.000 | 0.000 | 0.876 | 0.292 | Evaluation complete. -
Warning: Compared to COCO and HPE evaluation, BOP evaluation is much more compute expensive, which can take up to an hour for a full run or even more depending on the compute resource.
-
Results format: You should store the results in a
.csvfile following the BOP results format. Each line should represent one pose estimate with the following variables separated by commas:scene_id: Scene ID. You can get this byget_bop_id_from_idx().im_id: Image ID. You get can this byget_bop_id_from_idx().obj_id: YCB object ID.score: Confidence score.R: A3x3rotation matrix inr11 r12 r13 r21 r22 r23 r31 r32 r33.t: A3x1translation vector (in mm) int1 t2 t3.time: Set to-1.
As described in the supplementary paper Sec. C.1, to speed up the BOP evaluation we only evaluate on a set of subsampled keyframes. As a result, you only need to generate pose estimates for these keyframes. Each image sample will contain a
is_bop_targetkey to indicate whether this image is a keyframe used for BOP evaluation. The example below shows how you may useis_bop_target:from dex_ycb_toolkit.factory import get_dataset dataset = get_dataset('s0_test') for sample in dataset: if not sample['is_bop_target']: continue # Generate object pose estimates below for this image sample.You can also look at the example result files in
results/example_results_bop_*.csv. -
To evaluate on your own results, simply add
--nameto specify the setup and split and--res_fileto specify the path to the result file. For example:python examples/evaluate_bop.py \ --name s0_test \ --res_file path/to/results.csv
HPE Evaluation
-
The example below shows how to run HPE evaluation using an example result file. The output will be logged to
results/hpe_eval_s0_test_example_results_hpe_s0_test.log. This will also plot the PCK curves and save them toresults/hpe_curve_s0_test_example_results_hpe_s0_test/.python examples/evaluate_hpe.pyYou should see the following output (click to expand):
Running evaluation Results: | alignment | MPJPE (mm) | AUC | |:--------------|-------------:|-------:| | absolute | 280.4081 | 0.0019 | | root-relative | 104.7705 | 0.0585 | | procrustes | 49.1635 | 0.1545 | Evaluation complete. -
Results format: You should store the results in a
.txtfile. Each line should represent the predicted 3D position of the 21 hand joints of one image sample. Particularly, each line should have 64 comma-separated numbers:- The first number is the index of the image sample.
- The following 63 numbers are the
[x, y, z]values (in mm) of the 21 joints in the camera coordinates of the image. The numbers should be ordered inx1, y1, z1, x2, y2, z2, ..., x21, y21, z21, where the joint order is specified here.
You can also look at the example result files in
results/example_results_hpe_*.txt. -
To evaluate on your own results, simply add
--nameto specify the setup and split and--res_fileto specify the path to the result file. For example:python examples/evaluate_hpe.py \ --name s0_test \ --res_file path/to/results.txt
Grasp Evaluation
-
The Grasp evaluation simply takes a result file on object pose (used for BOP evaluation) and a result file on hand segmentation (used for COCO evaluation). It will generate grasps for handover based on these results and evaluate these grasps accordingly.
-
The example below shows how to run Grasp evaluation using example result files. The output will be logged to
results/grasp_eval_s0_test_example_results_bop_s0_test_example_results_coco_s0_test. This will also generate a result fileresults/grasp_res_s0_test_example_results_bop_s0_test_example_results_coco_s0_test.json, which can later be used for plotting precision-coverage curves.python examples/evaluate_grasp.pyYou should see the following output (click to expand):
Running evaluation 0001/1152 648 003_cracker_box # gt grasps: 62 0002/1152 722 003_cracker_box # gt grasps: 62 0003/1152 796 003_cracker_box # gt grasps: 62 0004/1152 870 003_cracker_box # gt grasps: 62 0005/1152 944 003_cracker_box # gt grasps: 62 . . . 1148/1152 92972 061_foam_brick # gt grasps: 60 1149/1152 93044 061_foam_brick # gt grasps: 60 1150/1152 93116 061_foam_brick # gt grasps: 60 1151/1152 93188 061_foam_brick # gt grasps: 60 1152/1152 93260 061_foam_brick # gt grasps: 60 Results: | radius (m) | angle (deg) | dist th (m) | coverage | precision | |-------------:|--------------:|--------------:|-----------:|------------:| | 0.0500 | 15 | 0.0000 | 0.0000 | 0.0000 | | 0.0500 | 15 | 0.0100 | 0.0000 | 0.0000 | | 0.0500 | 15 | 0.0200 | 0.0000 | 0.0000 | | 0.0500 | 15 | 0.0300 | 0.0000 | 0.0000 | | 0.0500 | 15 | 0.0400 | 0.0000 | 0.0000 | | 0.0500 | 15 | 0.0500 | 0.0000 | 0.0000 | | 0.0500 | 15 | 0.0600 | 0.0000 | 0.0000 | | 0.0500 | 15 | 0.0700 | 0.0000 | 0.0000 | Evaluation complete. -
You can also run with a
--visualizeflag, which will simultaneously save visualizations of predicted grasps. The visualizations will be saved toresults/grasp_vis_s0_test_example_results_bop_s0_test_example_results_coco_s0_test/.python examples/evaluate_grasp.py --visualize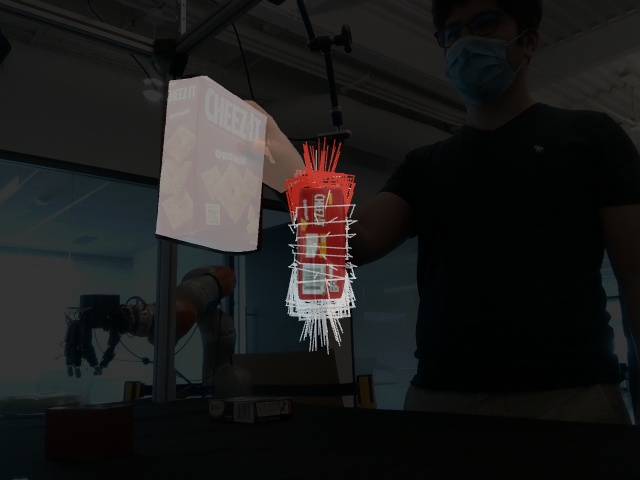
-
The above command requires an active display manager. You can also run an offscreen renderer on a headless server with EGL:
PYOPENGL_PLATFORM=egl python examples/evaluate_grasp.py --visualize -
To evaluate on your own results, simply add
--nameto specify the setup and split and--bop_res_fileand--coco_res_fileto specify the paths to the BOP and COCO result files. For example:python examples/evaluate_grasp.py \ --name s0_test \ --bop_res_file path/to/bop/results.csv \ --coco_res_file path/to/coco/results.json -
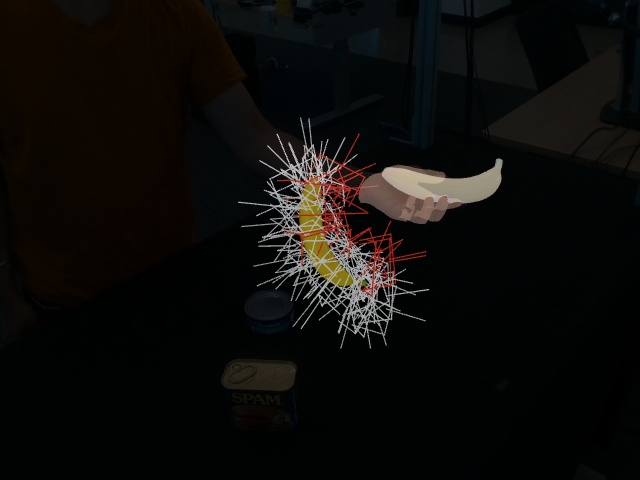
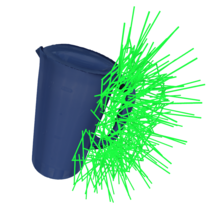
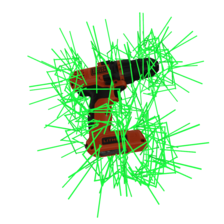
The Grasp evaluation makes use of a set of (100) pre-generated grasps for each object. You can visualize these pre-generated grasps with:
python examples/visualize_grasps.py

Reproducing CVPR 2021 Results
We provide the result files of the benchmarks reported in the CVPR 2021 paper. Below we show how you can run evaluation on these files and reproduce the exact numbers in the paper.
To run the evaluation, you need to first download the CVPR 2021 results.
./results/fetch_cvpr2021_results.sh
The full set of evaluation scripts can be found in examples/all_cvpr2021_results_eval_scripts.sh. Below we show some examples.
-
For example, to evaluate the 2D object and keypoint detection (COCO) results of Mask R-CNN (Detectron2) on
s0, you can run:python examples/evaluate_coco.py \ --name s0_test \ --res_file results/cvpr2021_results/coco_maskrcnn_s0_test.jsonYou should see the following output (click to expand):
Evaluation results for *bbox*: | AP | AP50 | AP75 | APs | APm | APl | |:------:|:------:|:------:|:------:|:------:|:------:| | 75.762 | 96.082 | 87.723 | 31.271 | 77.584 | 71.907 | Per-category *bbox* AP: | category | AP | category | AP | category | AP | |:--------------------|:-------|:----------------------|:-------|:--------------------|:-------| | 002_master_chef_can | 83.872 | 003_cracker_box | 85.846 | 004_sugar_box | 81.297 | | 005_tomato_soup_can | 76.031 | 006_mustard_bottle | 81.557 | 007_tuna_fish_can | 68.076 | | 008_pudding_box | 73.595 | 009_gelatin_box | 69.509 | 010_potted_meat_can | 75.634 | | 011_banana | 70.533 | 019_pitcher_base | 87.170 | 021_bleach_cleanser | 80.978 | | 024_bowl | 80.615 | 025_mug | 76.013 | 035_power_drill | 81.826 | | 036_wood_block | 83.745 | 037_scissors | 64.070 | 040_large_marker | 52.693 | | 051_large_clamp | nan | 052_extra_large_clamp | 73.413 | 061_foam_brick | 72.683 | | hand | 71.847 | | | | | Evaluation results for *segm*: | AP | AP50 | AP75 | APs | APm | APl | |:------:|:------:|:------:|:------:|:------:|:------:| | 69.584 | 93.835 | 78.718 | 20.954 | 70.949 | 77.700 | Per-category *segm* AP: | category | AP | category | AP | category | AP | |:--------------------|:-------|:----------------------|:-------|:--------------------|:-------| | 002_master_chef_can | 82.683 | 003_cracker_box | 83.721 | 004_sugar_box | 77.713 | | 005_tomato_soup_can | 74.745 | 006_mustard_bottle | 79.395 | 007_tuna_fish_can | 67.144 | | 008_pudding_box | 70.392 | 009_gelatin_box | 68.429 | 010_potted_meat_can | 72.659 | | 011_banana | 63.432 | 019_pitcher_base | 84.669 | 021_bleach_cleanser | 77.515 | | 024_bowl | 78.120 | 025_mug | 71.945 | 035_power_drill | 73.797 | | 036_wood_block | 81.409 | 037_scissors | 29.361 | 040_large_marker | 42.423 | | 051_large_clamp | nan | 052_extra_large_clamp | 54.032 | 061_foam_brick | 72.848 | | hand | 54.834 | | | | | Evaluation results for *keypoints*: | AP | AP50 | AP75 | APm | APl | |:------:|:------:|:------:|:------:|:------:| | 36.418 | 71.681 | 32.762 | 38.779 | 35.363 | Per-category *keypoints* AP: | category | AP | category | AP | category | AP | |:--------------------|:-------|:----------------------|:-----|:--------------------|:-----| | 002_master_chef_can | nan | 003_cracker_box | nan | 004_sugar_box | nan | | 005_tomato_soup_can | nan | 006_mustard_bottle | nan | 007_tuna_fish_can | nan | | 008_pudding_box | nan | 009_gelatin_box | nan | 010_potted_meat_can | nan | | 011_banana | nan | 019_pitcher_base | nan | 021_bleach_cleanser | nan | | 024_bowl | nan | 025_mug | nan | 035_power_drill | nan | | 036_wood_block | nan | 037_scissors | nan | 040_large_marker | nan | | 051_large_clamp | nan | 052_extra_large_clamp | nan | 061_foam_brick | nan | | hand | 36.418 | | | | | Evaluation complete.The output will also be logged to
results/coco_eval_s0_test_coco_maskrcnn_s0_test.log. -
For example, to evaluate the 6D object pose estimation (BOP) results of CosyPose on
s1, you can run:python examples/evaluate_bop.py \ --name s1_test \ --res_file results/cvpr2021_results/bop_cosypose_s1_test.csvYou should see the following output (click to expand):
Deriving results for *all* Evaluation results for *all*: | vsd | mssd | mspd | mean | |:------:|:------:|:------:|:------:| | 50.384 | 71.791 | 74.431 | 65.535 | Per-object scores for *all*: | object | vsd | mssd | mspd | mean | |:----------------------|-------:|-------:|-------:|-------:| | 002_master_chef_can | 85.753 | 83.628 | 82.859 | 84.080 | | 003_cracker_box | 84.040 | 92.605 | 88.905 | 88.516 | | 004_sugar_box | 76.383 | 82.469 | 84.067 | 80.973 | | 005_tomato_soup_can | 55.897 | 59.633 | 69.034 | 61.521 | | 006_mustard_bottle | 62.274 | 77.397 | 77.298 | 72.323 | | 007_tuna_fish_can | 56.964 | 61.002 | 75.030 | 64.332 | | 008_pudding_box | 60.449 | 77.836 | 84.344 | 74.209 | | 009_gelatin_box | 56.673 | 72.329 | 82.828 | 70.610 | | 010_potted_meat_can | 55.996 | 76.488 | 83.338 | 71.941 | | 011_banana | 6.616 | 63.311 | 64.266 | 44.731 | | 019_pitcher_base | 43.229 | 73.489 | 59.781 | 58.833 | | 021_bleach_cleanser | 61.659 | 75.832 | 69.177 | 68.889 | | 024_bowl | 72.657 | 87.537 | 91.571 | 83.922 | | 025_mug | 44.858 | 64.239 | 70.424 | 59.841 | | 035_power_drill | 19.341 | 75.055 | 68.193 | 54.196 | | 036_wood_block | 60.846 | 80.535 | 73.649 | 71.677 | | 037_scissors | 1.481 | 47.346 | 44.762 | 31.196 | | 040_large_marker | 42.481 | 70.218 | 86.952 | 66.550 | | 052_extra_large_clamp | 24.680 | 77.485 | 78.131 | 60.099 | | 061_foam_brick | 32.808 | 30.573 | 47.635 | 37.006 | Deriving results for *grasp only* Evaluation results for *grasp only*: | vsd | mssd | mspd | mean | |:------:|:------:|:------:|:------:| | 43.372 | 63.000 | 65.931 | 57.434 | Per-object scores for *grasp only*: | object | vsd | mssd | mspd | mean | |:----------------------|-------:|-------:|-------:|-------:| | 002_master_chef_can | 79.613 | 76.590 | 75.433 | 77.212 | | 003_cracker_box | 82.660 | 94.330 | 88.185 | 88.392 | | 004_sugar_box | 69.308 | 69.196 | 70.325 | 69.609 | | 005_tomato_soup_can | 44.397 | 50.901 | 62.995 | 52.764 | | 006_mustard_bottle | 59.477 | 71.649 | 70.210 | 67.112 | | 007_tuna_fish_can | 41.092 | 44.802 | 61.113 | 49.002 | | 008_pudding_box | 55.603 | 73.812 | 81.245 | 70.220 | | 009_gelatin_box | 44.160 | 58.278 | 70.443 | 57.627 | | 010_potted_meat_can | 49.464 | 70.085 | 76.572 | 65.374 | | 011_banana | 5.492 | 47.786 | 53.166 | 35.481 | | 019_pitcher_base | 40.258 | 66.738 | 51.030 | 52.675 | | 021_bleach_cleanser | 55.303 | 71.964 | 63.579 | 63.615 | | 024_bowl | 61.346 | 79.147 | 83.728 | 74.740 | | 025_mug | 35.344 | 51.434 | 58.652 | 48.476 | | 035_power_drill | 13.889 | 70.908 | 62.873 | 49.223 | | 036_wood_block | 56.199 | 77.507 | 67.724 | 67.143 | | 037_scissors | 0.644 | 37.083 | 35.339 | 24.355 | | 040_large_marker | 24.572 | 51.052 | 76.110 | 50.578 | | 052_extra_large_clamp | 18.313 | 65.989 | 68.030 | 50.777 | | 061_foam_brick | 25.615 | 25.186 | 39.571 | 30.124 | Evaluation complete.The output will also be logged to
results/bop_eval_s1_test_bop_cosypose_s1_test.log. -
For example, to evaluate the 3D hand pose estimation (HPE) results of Spurr et al. + HRNet32 on
s2, you can run:python examples/evaluate_hpe.py \ --name s2_test \ --res_file results/cvpr2021_results/hpe_spurr_hrnet_s2_test.txtYou should see the following output (click to expand):
Running evaluation Results: | alignment | MPJPE (mm) | AUC | |:--------------|-------------:|-------:| | absolute | 80.6272 | 0.2173 | | root-relative | 25.4875 | 0.5299 | | procrustes | 8.2075 | 0.8359 | Evaluation complete.The output will also be logged to
results/hpe_eval_s2_test_hpe_spurr_hrnet_s2_test.log. -
For example, to evaluate the object handover (Grasp) results of CosyPose (for 6D object pose) and Mask R-CNN (Detectron2) (for hand segmentation) on
s1, you can run:python examples/evaluate_grasp.py \ --name s1_test \ --bop_res_file results/cvpr2021_results/bop_cosypose_s1_test.csv \ --coco_res_file results/cvpr2021_results/coco_maskrcnn_s1_test.jsonYou should see the following output (click to expand):
Running evaluation 0001/1440 2980 003_cracker_box # gt grasps: 73 0002/1440 3050 003_cracker_box # gt grasps: 73 0003/1440 3120 003_cracker_box # gt grasps: 73 0004/1440 3190 003_cracker_box # gt grasps: 73 0005/1440 3260 003_cracker_box # gt grasps: 73 . . . 1436/1440 115990 061_foam_brick # gt grasps: 45 1437/1440 116064 061_foam_brick # gt grasps: 45 1438/1440 116138 061_foam_brick # gt grasps: 45 1439/1440 116212 061_foam_brick # gt grasps: 45 1440/1440 116286 061_foam_brick # gt grasps: 45 Results: | radius (m) | angle (deg) | dist th (m) | coverage | precision | |-------------:|--------------:|--------------:|-----------:|------------:| | 0.0500 | 15 | 0.0000 | 0.4110 | 0.2507 | | 0.0500 | 15 | 0.0100 | 0.3838 | 0.3556 | | 0.0500 | 15 | 0.0200 | 0.3408 | 0.3826 | | 0.0500 | 15 | 0.0300 | 0.2906 | 0.4027 | | 0.0500 | 15 | 0.0400 | 0.2412 | 0.4149 | | 0.0500 | 15 | 0.0500 | 0.1920 | 0.4125 | | 0.0500 | 15 | 0.0600 | 0.1476 | 0.3695 | | 0.0500 | 15 | 0.0700 | 0.1133 | 0.3117 | Evaluation complete.The output will also be logged to
results/grasp_eval_s1_test_bop_cosypose_s1_test_coco_maskrcnn_s1_test.log.
Finally, you can reproduce the grasp precision-coverage curves for object handover on s1 with:
python examples/plot_grasp_curve.py
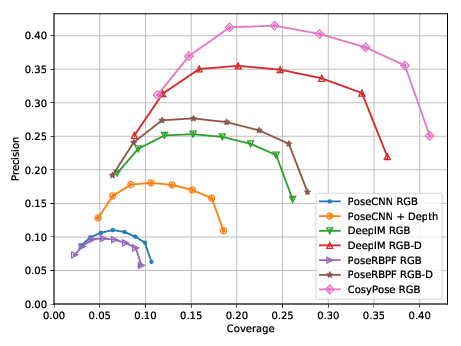
This will save the precision-coverage curves on s1 to results/grasp_precision_coverage_s1_test.pdf.
The precision-coverage curves on setup s0, s2, and s3 can be generated with:
python examples/plot_grasp_curve.py --name s0_test
python examples/plot_grasp_curve.py --name s2_test
python examples/plot_grasp_curve.py --name s3_test
Visualizing Sequences
Besides visualizing the ground truths of one image sample, we also provide tools to visualize the captured hand and object motion of a full sequence. The tools include (1) an interactive 3D viewer and (2) an offline renderer.
Interactive 3D Viewer
-
The example below shows how to run the interactive 3D viewer given a sequence name. By default it will first preload and preprocess the data of the entire sequence to provide a high frame rate rendering afterward. The preprocessing by default uses GPU. If you do not have a GPU, you need to add a
--device cpuflag to run the preprocessing on CPU.# Run on GPU python examples/view_sequence.py --name 20200709-subject-01/20200709_141754 # Run on CPU python examples/view_sequence.py --name 20200709-subject-01/20200709_141754 --device cpuThe 3D viewer provides some basic controls using mouse and keyboard. You can find the control instructions here.
-
Warning: The above command may consume significant CPU memory (e.g. >8G) due to the preload. You can also load frames online without preloading using a
--no-preloadflag, at the sacrifice of the rendering frame rate:python examples/view_sequence.py --name 20200709-subject-01/20200709_141754 --no-preload -
You can list the names of all the provided sequences (1,000 in total) with:
for x in $DEX_YCB_DIR/2020*-*/; do for y in ${x}2020*_*/; do echo $(basename $x)/$(basename $y); done; doneYou should see the following output (click to expand):
20200709-subject-01/20200709_141754 20200709-subject-01/20200709_141841 20200709-subject-01/20200709_141931 20200709-subject-01/20200709_142022 20200709-subject-01/20200709_142123 . . . 20201022-subject-10/20201022_114741 20201022-subject-10/20201022_114802 20201022-subject-10/20201022_114824 20201022-subject-10/20201022_114847 20201022-subject-10/20201022_114909
Offline Renderer
-
The example below shows how to run the offline renderer given a sequence name. Similar to the 3D viewer above, you need a
--device cpuflag to run the preprocessing on CPU.# Run on GPU python examples/render_sequence.py --name 20200709-subject-01/20200709_141754 # Run on CPU python examples/render_sequence.py --name 20200709-subject-01/20200709_141754 --device cpuThis will render the color image, segmentation map, and a visualization of the hand joint position for all the frames in the sequence. The rendered images will be saved to
data/render/.





-
Similar to the Grasp evaluation, if you do not have an active display manager, you can run an offscreen renderer on a headless server with EGL:
PYOPENGL_PLATFORM=egl python examples/render_sequence.py --name 20200709-subject-01/20200709_141754






